
TECHNO BROTHER
1 636 постов
•
12 517 подписчиков

STA333BW + 0.96 OLED — цифровой усилитель 2х20 Вт (Arduino)
S/PDIF (Sony/Philips Digital Interface) – распространенный и стандартизированный интерфейс, предназначенный для передачи цифрового звука между доступными компонентами, звуковыми картами, ресиверами и аудиоаппаратурой.
I2S — стандарт интерфейса электрической последовательной шины, использующийся для соединения цифровых аудиоустройств. Применяется для передачи PCM-аудиоданных между интегральными схемами в электронном устройстве. Шина I2S передает по разным линиям сигналы синхронизации и сигналы данных, что приводит к снижению фазового дрожания, типичного для систем связи, восстанавливающих сигналы синхронизации из целого потока.
STA333BW — полнофункциональный цифровой аудио усилитель (класса D), включающий силовой каскад для системы стерео усилителей. В STA333BW интегрирована система цифровой обработки аудиосигнала (ЦАП), высокоточный цифровой ШИМ-модулятор и два мощных полномостовых каскада питания МОП-транзисторов.
STA333BW поддерживает формат передачи цифровых данных I2S (I²S — стандарт интерфейса электрической последовательной шины, использующийся для соединения цифровых аудиоустройств) с частотой дискретизации от 8 кГц до 192 кГц, с разрешением до 24 бит.
Усилитель может работать в нескольких режимах подключения нагрузки:
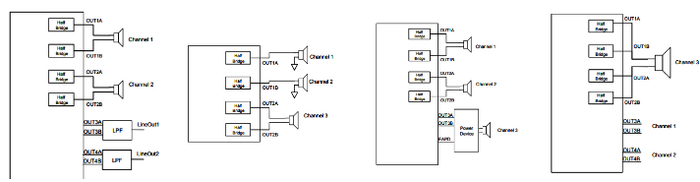
В статье будет рассмотрен только первый вариант подключения нагрузки к усилителю (выход 2.0 — 2х20 Вт при напряжении питания 18 В).
Усилитель выдает 2 x 20 Вт, оснащен цифровым регулятором громкости, баланса, регуляторы тембра ВЧ и НЧ, регулятор полосы НЧ, de-emphasis, так же доступны функции MUTE и STANDBY.
Структурная схема усилителя
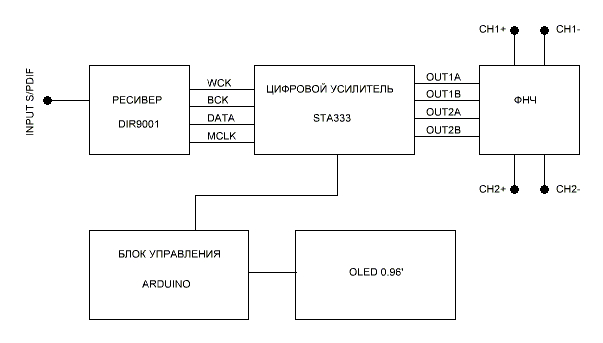
Ресивер S/PDIF собран на ИМС DIR9001, так как вход DIR9001 имеет вход уровня TTL, сигнал S/PDIF подается через преобразователь интерфейса MAX485. DIR9001 поддерживает формат I2S, 24 бит, частота дискредитации 96 кГц.
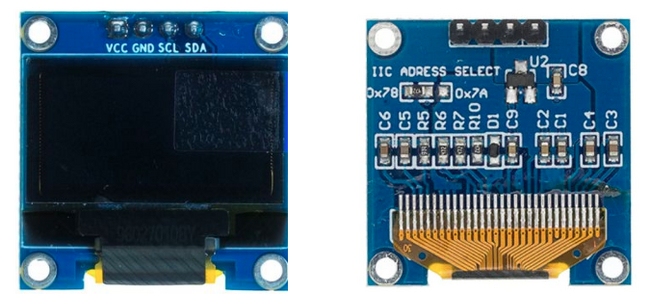
Для вывода информации о настройках используется дисплей 0.96′ I2C 128X64 OLED. Управление OLED дисплеем в данном примере осуществляется при помощи шины I2C.
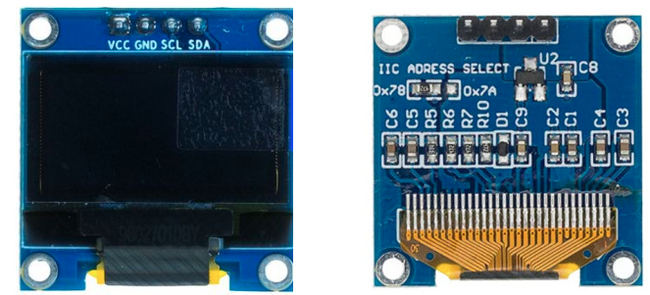
Параметры дисплея SSD1306:
Технология дисплея: OLED
Разрешение дисплея: 128 на 64 точки
Диагональ дисплея: 0,96 дюйма
Угол обзора: 160°
Напряжение питания: 2.8 В ~ 5.5 В
Мощность: 0,08 Вт
Габариты: 27.3 мм х 27.8 мм х 3.7 мм
Основные параметры усилителя STA333BW
Напряжение питания цифровое и аналоговое 3,3 В
Напряжение питания для выходного каскада усилителя от 4.5 В to 21.5 В
Режим работы 2.0 и 2.1 (в данном примере рассматривается режим работы 2.0)
Выходная мощность в режиме 2.0 … 2 x 20 Вт (8 Ом 18 В)
Выходная мощность в режиме 2.1 … 2 x 9 Вт + 1 х 20 Вт (8 Ом 18 В)
Динамический диапазон 100 дБ
Частота дискредитации от 32 до 192 кГц
Управление цифровое I2C
Регулировка громкости от -80 до 48 дБ с шагом 0,5 дБ
Регулировка тембра ВЧ НЧ ±12 дБ с шагом 2 дБ
Регулировка полосы НЧ от 80 до 340 Гц (14 шагов)
Коэффициент гармоник не более 0,2 % (Po = 1 W f = 1 kHz)
КПД 90% в режиме 2.0
Зашита от перегрева и токовая защита
Схема ресивера
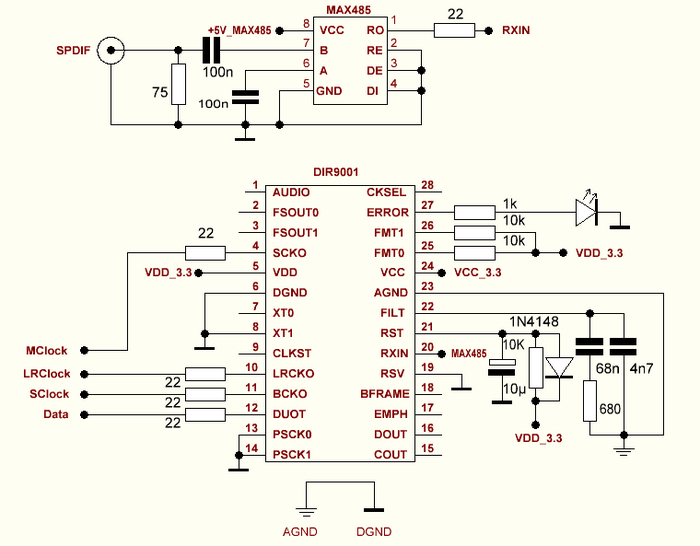
Схема усилителя
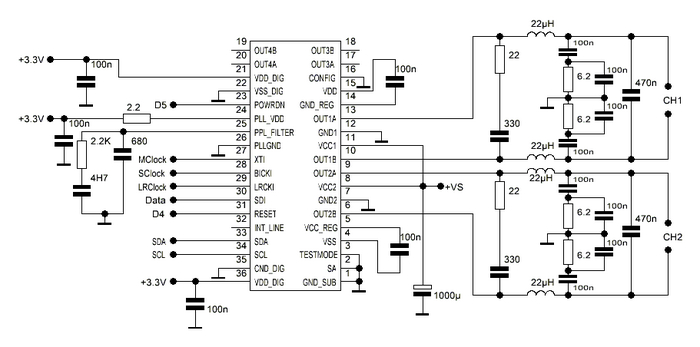
Схема управления
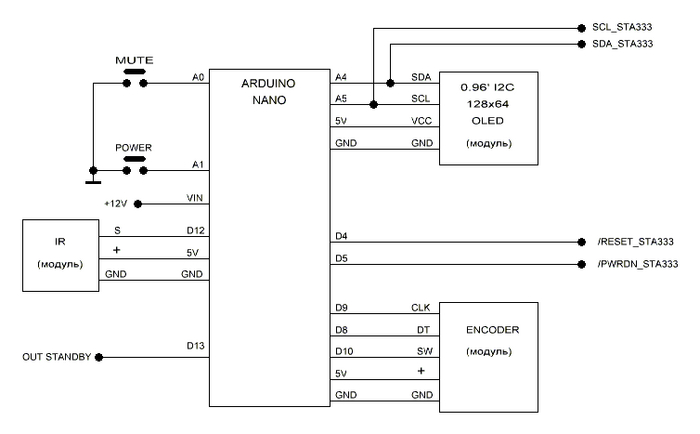
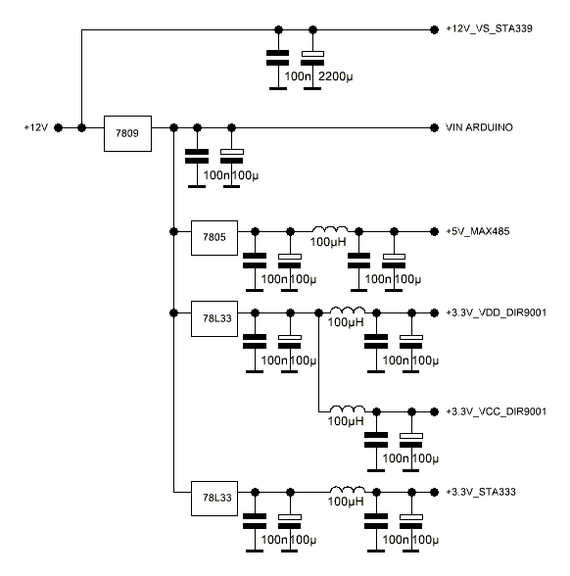
Схема источника питания
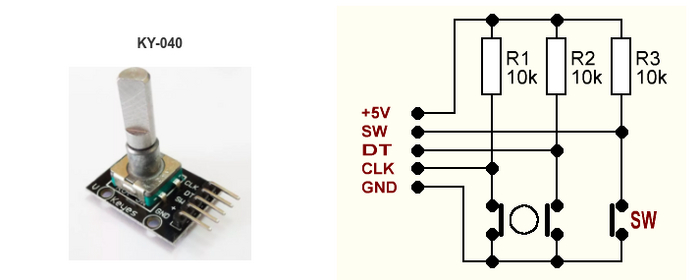
Для управления работой усилителя используется плата Arduino Nano, две кнопки и энкодер (модуль KY-040), так же управление полностью продублировано ИК пультом, информация о текущих настройка отображается на дисплее 0.96′ OLED.
На дисплей выводится пять меню, переключение меню осуществляется при помощи кнопки энкодера.
Меню громкости

Bass

Treble

Частота Bass

Баланс

Дополнительные функции
STANDBY (ток потребления усилителя в режиме STANDBY 0.3 мкА)

MUTE

De-emphasis

ИК пульт дублирует работу энкодера и кнопок. Для управления усилителем подойдет практически любой пульт ИК, для поддержки Вашего пульта необходимо прописать коды кнопок в скетч:
#define IR_1 0x2FDD02F // Кнопка menu up
#define IR_2 0x2FD32CD // Кнопка menu dw
#define IR_3 0x2FD906F // Кнопка >
#define IR_4 0x2FDF20D // Кнопка <
#define IR_5 0x2FDF00F // Кнопка MUTE
#define IR_6 0x2FD00FF // Кнопка STANDBY (POWER)
#define IR_7 0x2FD6A95 // DEMP
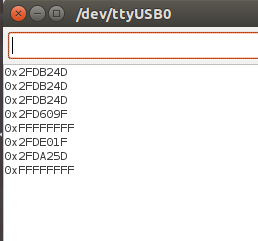
Для получения кодов кнопок Вашего пульта загрузите скетч и откройте монитор порта, при нажатии кнопки пульта его код будет отображен в мониторе порта.
Скетч - http://rcl-radio.ru/?p=130127
Показать полностью
16
Вольтамперметр для источника питания на INA226

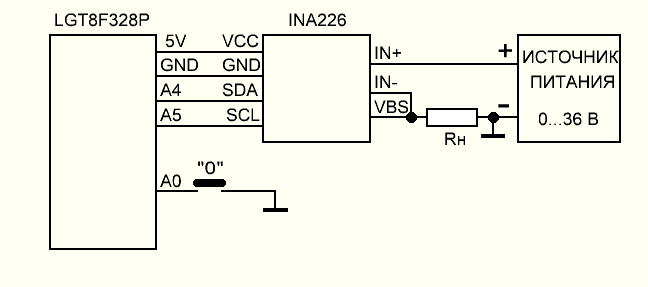
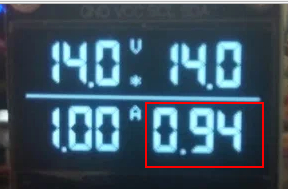
Микросхема INA226 (модуль) предназначена для высокоточного измерения напряжения, тока и потребляемой мощности. В модуле установлен шунт на 0,1 Ом, при этом модуль может измерять ток до 800 мА, но если заменить шунт например на 0,01 Ом, то диапазон измерения тока может быть расширен до 8 А.
Основные характеристики модуля на INA226:
Диапазон измеряемого напряжения 0–36 вольт
Максимальный ток 800 миллиампер (2 шага усиления, на 400 и 800 мА)
Напряжение питания 3 – 5,5 вольт
Потребляемая мощность (определяется самостоятельно):
Непрерывный режим: 0,35 мА
Режим пониженного энергопотребления: 2,3 мкА
Режимы измерения: непрерывный или по требованию
Количество выборок, которое собирается и усредняется 1, 4, 64, 128, 256, 512 или 1024
Время преобразования для измерения напряжения на восьми уровнях: от 0,14 до 8,2 мс
Связь через I2C, 4 настраиваемых адреса (модуль):
0x40: A0, A1 не замкнут с VCC
0x41: A0 = VCC, A1 не замкнут с VCC
0x44: A0 не замкнут с VCC, A1 = VCC
0x45: A0, A1 = VCC
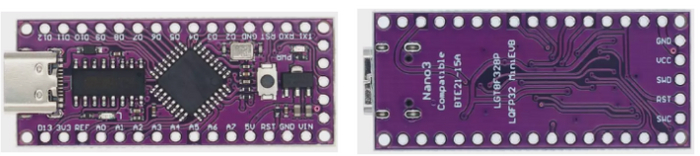
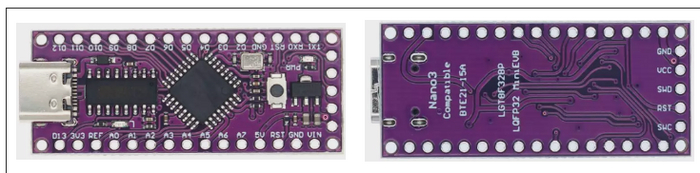
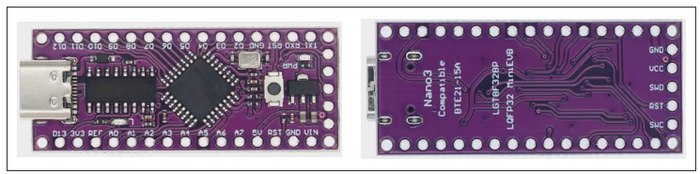
На платформе Arduino (плата LGT8F328P-LQFP32 MiniEVB) используя модуль INA226 можно сделать простой, но высокоточный вольтамперметр для регулируемого источника питания, вся информация будет выводится на дисплей LCD1602 c модулем I2C. Дополнительно модуль производит измерение мощности, а измеряя потребляемый ток и время на дисплей можно выводить ампер-часы, что удобно при зарядке аккумуляторов. Так как будет измеряться ампер-часы, то будет добавлена кнопка для обнуления результата измерения.
Как использовать плату в Arduino IDE написано в статье — http://rcl-radio.ru/?p=129966
Настройки платы LGT8F328P-LQFP32 MiniEVB в Arduino IDE

Помимо платы LGT8F328P-LQFP32 MiniEVB можно использовать плату Arduino Nano изменив значение регистра OCR1A на 15624.
Вывод монитора порта:
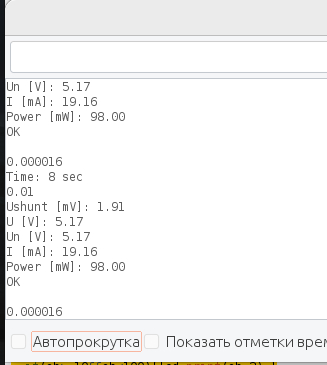

Скетч - http://rcl-radio.ru/?p=130346
Показать полностью
5
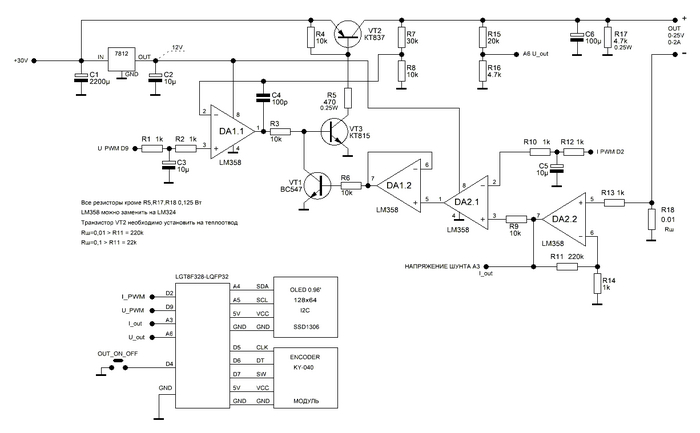
Источник питания 0-25В / 0-2А с токовой стабилизацией и цифровым управлением
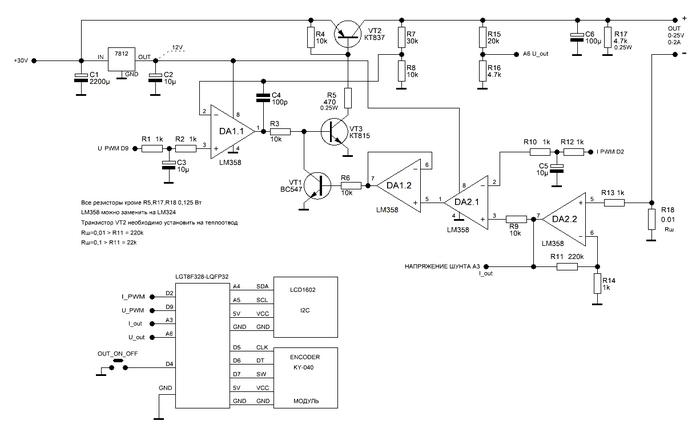
На этой странице показан пример создания источника питания с регулируемым выходным напряжением от 0 до 25 В и током нагрузки от 0 до 2 А. В источнике питания предусмотрена токовая стабилизация от 0,2 до 2 А. Регулирование напряжения и тока стабилизации цифровое, выполнено на микроконтроллере LGT8F328 (LGT8F328P-LQFP32 MiniEVB).
Источник питания состоит из двух основных блоков:
Силовая часть, содержит несколько транзисторов и ОУ, а так же шунт для измерения тока.
Цифровая часть состоит из микроконтроллера LGT8F328, дисплея 0.96′ I2C 128X64 OLED (SSD1306) и органов управления в виде энкодера и одной кнопки.
Схема источника питания
Параметры дисплея SSD1306:
Технология дисплея: OLED
Разрешение дисплея: 128 на 64 точки
Диагональ дисплея: 0,96 дюйма
Угол обзора: 160°
Напряжение питания: 2.8 В ~ 5.5 В
Мощность: 0,08 Вт
Габариты: 27.3 мм х 27.8 мм х 3.7 мм
Энкодер KY-040
Регулировка тока стабилизации и выходного напряжения
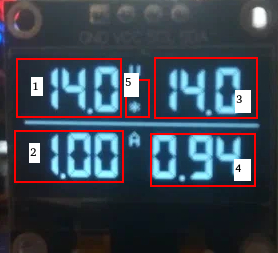
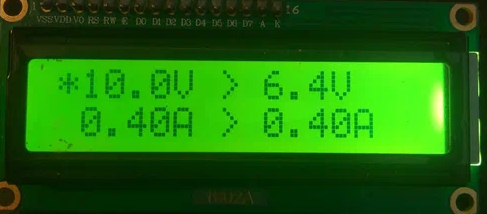
На дисплей в верхней строке выводятся показания установленного напряжения (1), а так же измеренное напряжение на выходе (3). В нижней строке выводятся показания установленного тока стабилизации (2) и измеренный ток (4). Заначек «*»(5) показывает активный для регулировки параметр. Переключение регулировки тока/напряжения производится нажатием кнопки энкодера. Для включения/отключения выхода необходимо нажать кнопку OUT_ON_OFF.
Измерение напряжения и выходного тока производится с разрешением 12 бит. Все установленные параметры сохраняются в энергонезависимой памяти. Индикатор тока нагрузки начинает работать при токе выше 0,05 А.

Для прошивки платы LGT8F328P-LQFP32 MiniEVB используется платформа Arduino. Как добавить плату LGT8F328P-LQFP32 MiniEVB в Arduino IDE написано в LGT8F328P-LQFP32 MiniEVB в Arduino IDE.
Источник питания нуждается в регулировке, регулировка содержит 4 параметра (коэффициента):
#define U_OUT_K 508
#define I_OUT_K 1970
#define I_STAB_K 1210
#define U_OUT_IND 157
Процесс регулировки состоит из нескольких этапов, которые должны быть выполнены в определенной очередности. В процессе регулировки необходимо менять корректирующие коэффициенты и несколько раз загружать измененный скетч.
Настройка выходного напряжения
К выходу источника питания подключите вольтметр, установите при помощи энкодера выходное напряжение на дисплее (не на выходе ИП) 18 В.

Подберите коэффициент U_OUT_K таким образом чтобы на выходе источника питания было 18,0 В.
Настройка измерителя напряжения
Установите при помощи энкодера выходное напряжение на дисплее 18 В.

Подберите коэффициент U_OUT_IND таким образом чтобы на дисплее было 18,0 В.
Настройка измерителя тока
Установите при помощи энкодера выходное напряжение на выходе источника питания 18 В.
Подключите нагрузку 5-10 Ом, так чтобы выходной ток быть больше 1 А.
Измерьте амперметром полученный ток нагрузки.
Подберите коэффициент I_OUT_K таким образом чтобы на показания тока на дисплее и измеренное амперметром были равны.
Настройка токовой стабилизации
Установите при помощи энкодера выходное напряжение на выходе источника питания 18 В.
Подключите нагрузку 5-10 Ом, так чтобы выходной ток быть больше 1 А.

Установите значение тока стабилизации на 10-50% меньше тока нагрузки, например если выходной ток 1,45 А, то установите ток стабилизации на 1,00 А
Если ток нагрузки выше тока стабилизации, то источник питания перейдет в режим стабилизации тока и будет выводить значение выходной тока в режиме стабилизации тока, подберите коэффициент I_STAB_K таким образом, чтобы указанный ток стабилизации и выходной ток стали равными.
В скетче уже указаны необходимые корректирующие коэффициенты, поэтому при правильной сборке уст-ва и соблюдения всех номиналов элементов указанных на схеме, источник питания будет правильно регулировать и измерять ток и напряжение. Настройка корректирующих коэффициентов необходима для получения большой точности источника параметров источника питания.
Скетч - http://rcl-radio.ru/?p=130243
Версия №2
Замена дисплея на LCD1602 I2C
Показать полностью
12
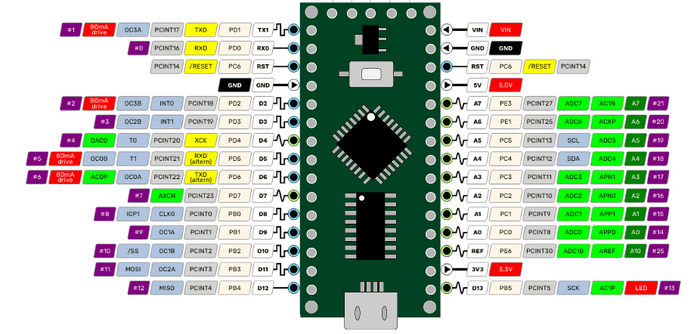
LGT8F328 ADC (Arduino IDE)
Микроконтроллер LGT8F328p и является клоном популярной AVR ATmega328p (Arduino NANO). Микроконтроллер LGT8F328p практически полностью совместим с микроконтроллером ATmega328p и обладает рядом дополнительных функций и возможностей превышающих ATmega328p.
Основные характеристики LGT8F328P
FLASH (ПЗУ): 32 Кбайт
SRAM (ОЗУ): 2 Кбайт
E2PROM (EEPROM): 0K / 1K / 2K / 4K / 8K (эмуляция)
PWM (ШИМ): 8
Частота: 32 МГц
АЦП: 9 пинов, 12 бит
ЦАП: 1 пин, 8 бит
Силовые пины: 4 (до 80 мА)
Таймеры 2x 8bit, 2x 16bit
UART: 1
SPI: 1
I2C: 1
PLL: 1
Опорное напряжение: 1.024В / 2.048В / 4.09В ± 0,5%
Логический уровень: 5В
Особенность АЦП в LGT8F328P является наличие нескольких опорных напряжений (1,024 В, 2,048 B, 4,096 B, VCC), несколько множителей входного сигнала (1, 8, 16 , 32) и увеличенная по сравнению Atmega328 разрядность АЦП до 12 бит. Так же имеется возможность использования дифференциального входа.
В статье будет показано несколько примеров использования ЦАП в LGT8F328P.
Стандартный код для измерения напряжения в Arduino IDE
void setup(){
Serial.begin(9600);
pinMode(A0,INPUT);
analogReadResolution(12);// АЦП 12 БИТ
analogReference(DEFAULT);// DEFAULT(Uп)
}
void loop(){
Serial.println(analogRead(A0));
delay(1000);
}
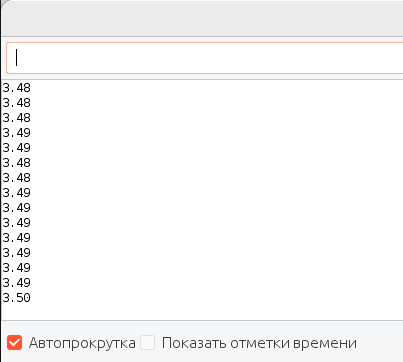
На вход А0 подается напряжение 3,3 В (с платы LGT8F328P-LQFP32 MiniEVB) и измеренное напряжение выводится в монитор порта:
Если использовать регистры, то можно получить аналогичный результат, но с возможностью изменить некоторые параметры, например изменить коэффициент деления системных тактов для генерации тактов
АЦП, тем самым уменьшить или увеличить длительность измерения.
void setup() {
Serial.begin(9600);
ADMUX |= 1 << REFS0 | 0b000;
/* REFS2 REFS1 REFS0 0 0 0 AREF 0 0 1 AVCC 0 1 0 2.048V 0 1 1 1.024V 1 0 0 4.096V Бит REFS2 относится к регистру ADCSRD */
ADCSRA |= 1 << ADEN | 1 << ADSC | 1 << ADATE | 0b111;
}
void loop() {
while((ADCSRA & (1 << ADIF)) == 0);
int u_data = (ADCL|ADCH << 8);
Serial.println(5.00/4096*u_data,2);
delay(1000);
}
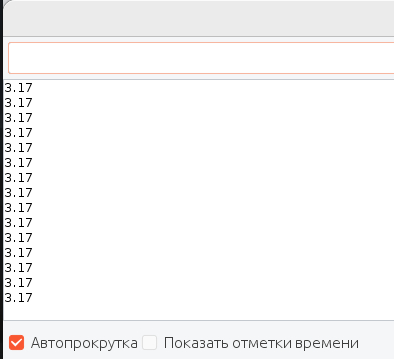
Вывод монитора порта:
Рассмотрим подробнее выше показанный код:
ADMUX — регистр управления мультиплексора АЦП, позволяет выбрать источник опорного напряжения, выбрать источник входного сигнала и осуществить выравнивание по левому или по правому краю результата измерения.

Выбор источника опорного напряжения:

Обратите внимание, что бит REFS2 относится к регистру ADCSRD.
Выбор источника входного сигнала
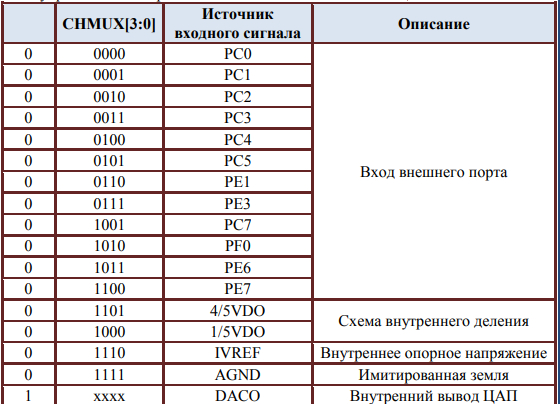
Как видно из кода:
ADMUX |= 1 << REFS0 | 0b0000;
выбрано опорно напряжение VCC (напряжение питания микроконтроллера), активен вход PC0 (A0).
ADCSRA — регистр A управления и состояния АЦП

ADEN — бит управления включением АЦП. Если бит ADEN установлен на 1,то АЦП включен.
ADSC — бит начала преобразование АЦП. Если бит ADSC установлен на 1, то активно непрерывное преобразование.
ADATE — бит запуска включением автоматически управления АЦП. Если бит ADATE установлен на 1, активируется функция автоматического запуска.
ADPS — бит выбора коэффициент деления предделителя ADC.
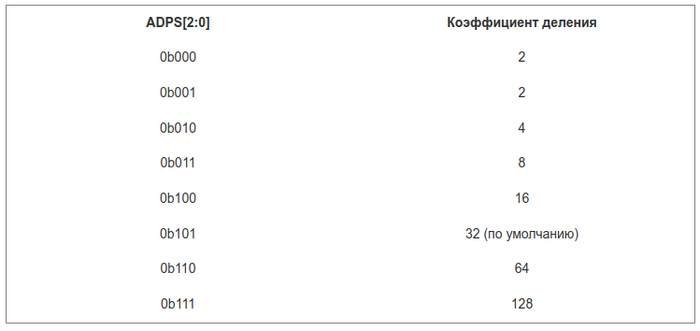
В коде выбраны все выше описанные биты регистра ADCSRA:
ADCSRA |= 1 << ADEN | 1 << ADSC | 1 << ADATE | 0b111;
После настройки конфигурации АЦП следует чтение регистров данных ADCH и ADCL. Следует отметить что первым необходимо считывать младший регистр данных ADCL.
Считывание данных возможно только после окончания преобразования, то есть как бит (флаг) ADIF станет равным 1.
while((ADCSRA & (1 << ADIF)) == 0);
После считываем данные:
int u_data = (ADCL|ADCH << 8);
и выводим результат в вольтах в монитор порта:
Serial.println(5.00/4096*u_data,2);
где:
5.00 — напряжение питания микроконтроллера, оно же и опорное
4096 — числовое значение равное максимальному числу 12 бит
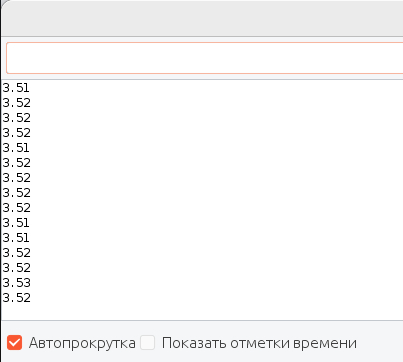
Так как производится измерение напряжения 3,3 В, то целесообразней перейти на опорное напряжение 4,096 В для увеличения точности напряжения:
void setup() {
Serial.begin(9600);
ADMUX = 0b000; ADCSRD |= 1 << REFS2;
/* REFS2 REFS1 REFS0 0 0 0 AREF 0 0 1 AVCC 0 1 0 2.048V 0 1 1 1.024V 1 0 0 4.096V Бит REFS2 относится к регистру ADCSRD */
ADCSRA |= 1 << ADEN | 1 << ADSC | 1 << ADATE | 0b111;
}
void loop() {
while((ADCSRA & (1 << ADIF)) == 0);
int u_data = (ADCL|ADCH << 8);
Serial.println(u_data/1000.00,2);
delay(1000);
}
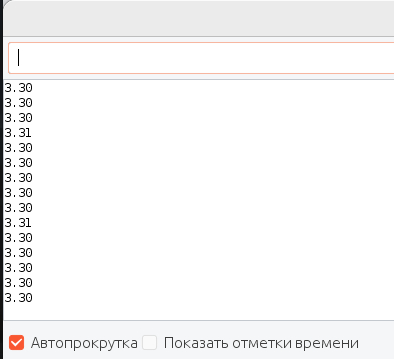
Монитор порта:
Как видно по показаниям монитора порта, при использовании разных опорных напряжений результат меняется, но даже при опорном напряжении 4,096 В имеется погрешность.
В LGT8F328 имеется регистры калибровки VCAL1, VCAL2, VCAL3 для напряжения 1,024, 2,048 и 4,096. Регистр VCAL используется как общий для всех калибровочных значений. При включении по умолчанию выбрано опорное напряжение 1,024 В, калибровочное значение хранится в регистре VCAL1, которое записывается в регистр VCAL. Если выбрать например опорное напряжение 4,096 В , то значение регистра VCAL3 так же будет записано в регистр VCAL. Как видно по показаниям, значение VCAL3 не обеспечивает большую точность измерения. Для более точного изменения необходимо подобрать более точный коэффициент и записать его в регистр VCAL.
Для просмотра калибровочного коэффициента установленного производителем микроконтроллера можно воспользоваться командой:
Serial.println(VCAL3); // 4,096 V
void setup() {
Serial.begin(9600);
ADMUX = 0b000; ADCSRD |= 1 << REFS2;
/* REFS2 REFS1 REFS0 0 0 0 AREF 0 0 1 AVCC 0 1 0 2.048V 0 1 1 1.024V 1 0 0 4.096V Бит REFS2 относится к регистру ADCSRD */
ADCSRA |= 1 << ADEN | 1 << ADSC | 1 << ADATE | 0b111;
VCAL = 30;
}
void loop() {
while((ADCSRA & (1 << ADIF)) == 0);
int u_data = (ADCL|ADCH << 8);
Serial.println(u_data/1000.00,2);
delay(1000);
}
Монитор порта:
Подобрав калибровочный коэффициент VCAL = 30, удалось значительно увеличить точность измерения.
Дифференциальный режим работы АЦП
Микроконтроллер LGT8F328 поддерживает дифференциальный режим работы аналогового входа. При этом на два аналоговых входа подается напряжение любой полярности не превышающее напряжение питания микроконтроллера.
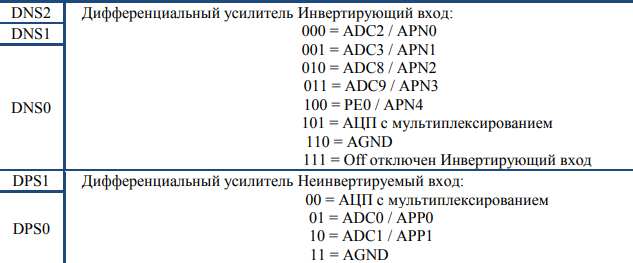
Основные настройки дифференциального входа находятся в регистре DAPCR.

Бит DAPEN разрешает работу дифференциального усилителя
Биты DNS[4:2] активируют работу инвертирующего входа дифференциальный усилителя
Биты DPS[1:0] активируют работу неинвертирующего входа дифференциальный усилителя
Измерение напряжения поданного на дифференциальный вход происходит в два этапа. Сначала делаем первый вход как дифференциальный, а второй как аналоговая земля, проводим измерение, далее входы меняем местами, то есть первый вход делаем как аналоговая земля, а второй вход делаем дифференциальным. Далее снова проводим измерения. В итоге получается два измерения, для получения конечного результата надо из результата одного измерения вычесть результат второго измерения.
Перед измерением в регистре ADMUX указывает активный вход и при необходимости делаем выбор опорного напряжения.
Пример кода:
void setup() {
Serial.begin(9600);
ADCSRD |= 1 << REFS2;// REF 4.096
VCAL = 30;
ADCSRA |= 1 << ADEN | 1 << ADSC | 1 << ADATE | 0b111;
}
void loop() {
ADMUX = 0b11;
DAPCR = 0;
DAPCR |= 1 << DAPEN | 0b11001;
while((ADCSRA & (1 << ADIF)) == 0);
int u_data0 = (ADCL|ADCH << 8);
// Serial.println(u_data0);
delay(500);
ADMUX = 0b00;
DAPCR = 0;
DAPCR |= 1 << DAPEN | 0b00111;
while((ADCSRA & (1 << ADIF)) == 0);
int u_data1 = (ADCL|ADCH << 8);
// Serial.println(u_data1);
Serial.println(float(u_data0-u_data1)/1000);
delay(500);
}
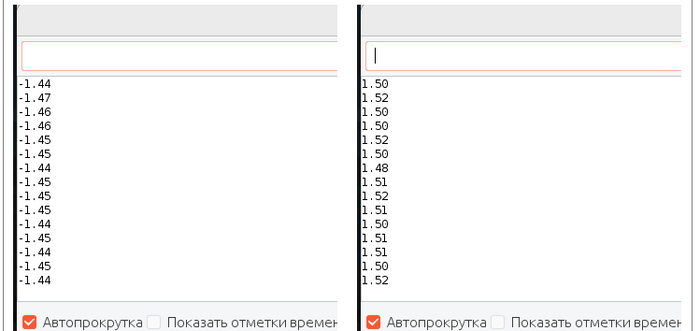
Для примера были выбраны входы А0 и А3 (ADC3 и ADC0), на них с элемента питания подается напряжение 1,5 В. Выбран внутренний опорный источник 4,096 В.
Как видно на скриншоте дифференциальный вход при смене полярности вполне корректно измерил напряжение элемента питания.
При выборе входа один должен быть инвертирующий, другой неинвертирующим. Так же измеряемое напряжение не должно иметь общего провода с GND микроконтроллера.
Показать полностью
13
Кодовый замок (Arduino)
Кодовый замок построен на базе Arduino, содержит минимальный набор элементов, выполнен в основном из модулей, прост в сборке.
Кодовый замок выполнен из следующих компонентов:
Плата LGT8F328p (можно применить Arduino Nano)
Гибкая матричная клавиатура 4 на 3 кнопки
Модуль реле 5 В
Модуль активного зуммера для Arduino
Электромагнитный замок 12 В
6-и разрядный семисегментный дисплей на базе драйвера TM1637



Схема кодового замка

Работа кодового замка достаточно проста, на клавиатуре необходимо ввести код и есть он верен сработает реле которое в свою очередь оправляет запирающим механизмом (электромагнитный замок 12 В).
Вводимый код отображается на дисплее, код может состоять от 1 до 6 цифр.
Режим ожидания

Ввод кода

После введения кода необходимо нажать кнопку:

Кнопка # позволяет сбросить код на ноль.
Код введен не верно

Код введен верно, срабатывание запирающего механизма (электромагнитный замок 12 В)

Срабатывание запирающего механизма будет активно в течении 3 секунд, после реле управляющее запирающим механизмом будет неактивно.
Скетч содержит MASTER код, этот код можно изменить только через повторную прошивку платы микроконтроллера. Этот код позволяет собственного говоря задать код открытия двери.
#define MASTER 345623 // (необходимо изменить на свой код перед прошивкой микроконтроллера)
При вводе этого кода на дисплее появится следующая надпись:

Далее вводим код который Вы в дальнейшем будете использовать для открытия двери. Нажимаем * , происходит открывание запирающего механизма и занесение этого кода в EEPROM.
Скетч - http://rcl-radio.ru/?p=130919
Показать полностью
10

ИИ-переводчик, который заставит тебя забыть о субтитрах
На днях вышла новая функция сервиса HeyGen, которая позволяет переводить видео с сохранением оригинального голоса человека. То есть, ты можешь смотреть видео на любом языке, и тебе не нужно будет читать субтитры. Перевод довольно точный, и мимика подгоняется под новое аудио.
Русского языка пока нет.
Источник мой Телеграм паблик: https://t.me/thefutureidol
Показать полностью
Анонсирована первая игра для Apple Vision Pro
Компания Resolution Games объявила о разработке игры Demeo для гарнитуры смешанной реальности Apple Vision Pro. Игра представляет собой кооперативный ролевой боевик с поддержкой до четырех игроков. Игроки будут исследовать подземелья, сражаться с монстрами и решать головоломки.
Выход игры запланирован на 2024 год.
Источник мой Телеграм паблик: https://t.me/thefutureidol
Показать полностью