Управление шаговым двигателем на Arduino через bluetooth
Сегодня поговорим о том, как можно сделать управление шаговым двигателем на Arduino через bluetooth.
Надеюсь моя информация будет полезной.
Спасибо! Всем добра!
Сегодня поговорим о том, как можно сделать управление шаговым двигателем на Arduino через bluetooth.
Надеюсь моя информация будет полезной.
Спасибо! Всем добра!
Содержание:
Часть 2.1.2: Доступ к атомарному регистру
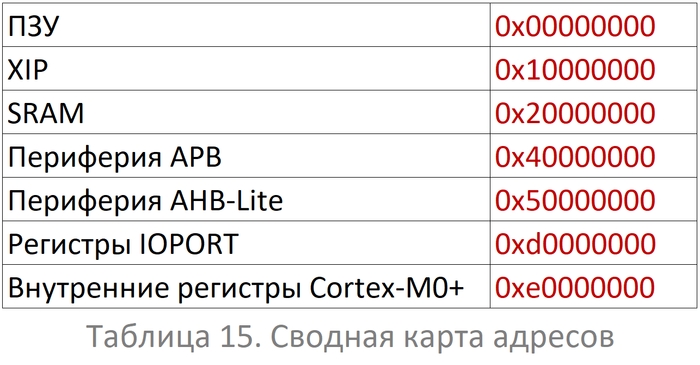
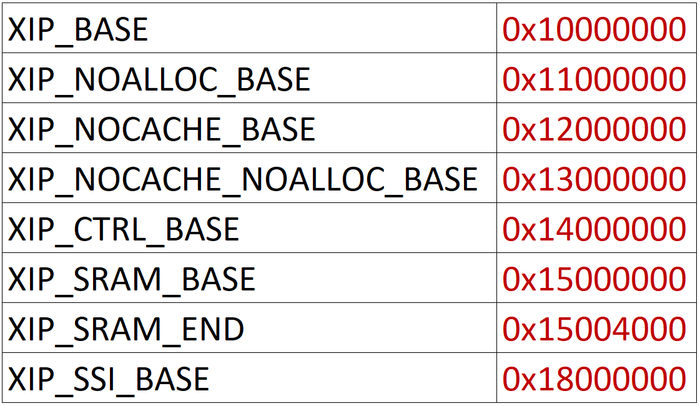
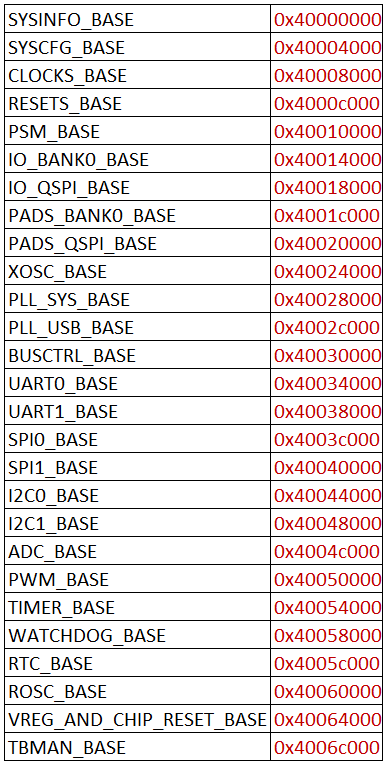
Часть 2.1.5: Список регистровКарта адресов для устройства разбита на разделы, как показано в Таблице 15. Подробности показаны в следующих разделах. При обращении к несопоставленным диапазонам адресов возникает ошибка шины.
2.2.1 Сводка
2.2.2 Подробности
ПЗУ:

Память с функцией "выполнения на месте":
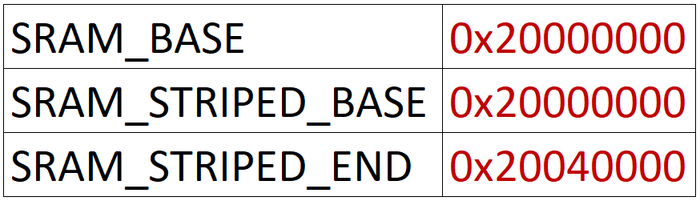
Объединённые модули статической памяти с произвольным доступом 0-3 (SRAM0-3):
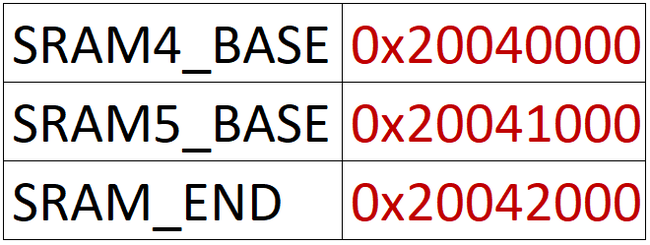
Всегда раздельные модули статической памяти с произвольным доступом 4-5 (SRAM 4-5):
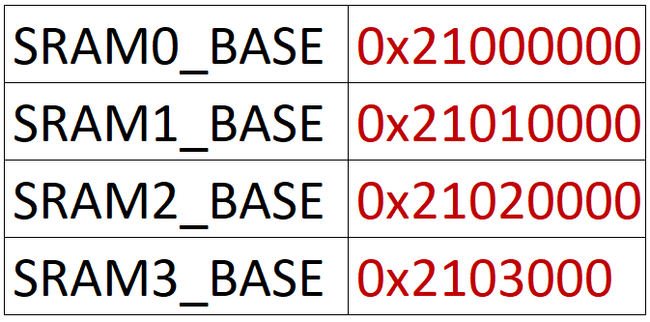
Раздельные псевдонимы модулей статической памяти с произвольным доступом 0-3 (SRAM0-3):
Периферия APB:
Периферия AHB-Lite:

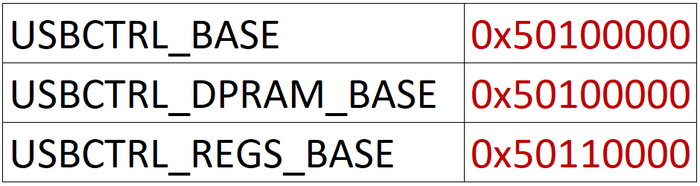
Универсальная последовательная шина имеет в своей основе двухпортовую память с параллельным интерфейсом доступа и следующими регистрами:
Остальные периферийные устройства AHB-Lite:
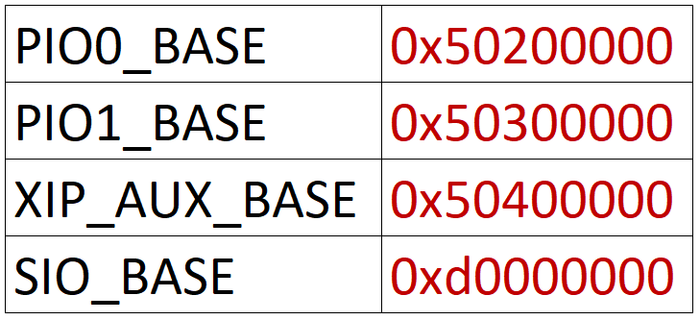
Периферия IOPORT:

Внутренняя периферия Cortex-M0+:

Знаю только 3:
1. ISPconfig (муторно ставить, плюс конфиг слишком муторный)
2. TinyCP (всё отлично, но не исправляют баги даже если м написать)
3. aaPanel (скатывается на платку, функционал отстаёт от 2)
может кто ещё видел панели для ARM
Разработал проект «Подсветка на ws2812, Arduino, Nextion».
И по данному проекту сделал блок уроков. Поэтапно разобрал, как можно реализовать данный проект с использованием дисплея Nextion. Полученные данные помогут реализовать не только данный проект, но и другие более интересные работы. Так как в уроках рассмотрел работу со всеми основными элементами Nextion Editor.
Урок Nextion:
Урок 1 - Скачать и установить Arduino IDE, Nextion Editor
Урок 2 - Подготовка графики для дисплея Nextion в Inkscape
Урок 3. Кнопка Dual state Nextion Включаем выключаем подсветку.
Урок 4 Button Nextion Управление яркостью, переключение режимов
Урок 5. Передаем информацию с Arduino на дисплей Nextion
Урок 6. Клавиатура дисплей Nextion. Timer, перенаправление на страницы.
Урок 7 Управление яркостью дисплея Nextion Страница ожидания
Бонусный урок.
Урок 8. Slider Nextion - управление яркостью подсветки (обзор)
Надеюсь моя информация будет полезной.
Спасибо! Всем добра!
Решил попробовать выжать из Arduino максимум и сделать на ней звуковой процессор, а именно - понижать тон голоса в реальном времени.
Звук будем оцифровывать бортовым АЦП, а воспроизводить при помощи широтной модуляции: например зададимся частотой 16 кГц, текущая ширина импульса будет пропорциональна значению с АЦП
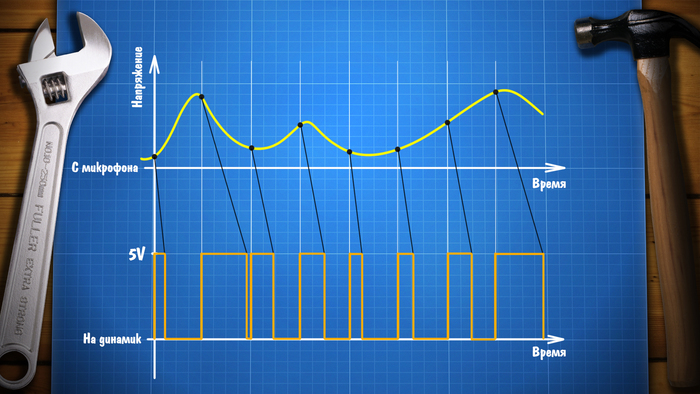
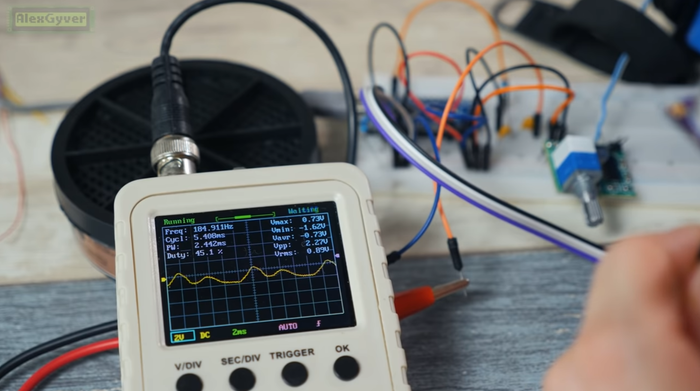
На выходе получится жутко свистящий цифровой сигнал, что ожидаемо

Добавим простейший RC фильтр
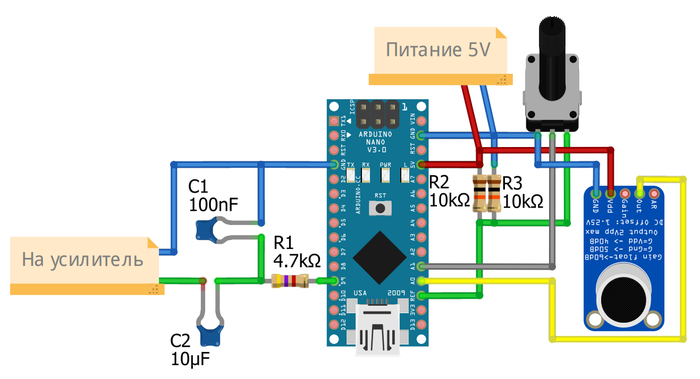
И звук, и форма сигнала станут гораздо лучше!
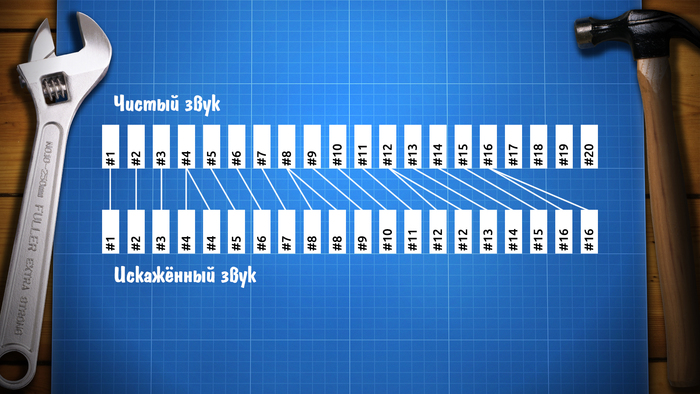
Далее нужно понизить тон. Здесь всё просто: задаёмся окном выборки и начинаем "пропускать" каждый N-ный сэмпл на выход, таким образом растягивая звук по времени
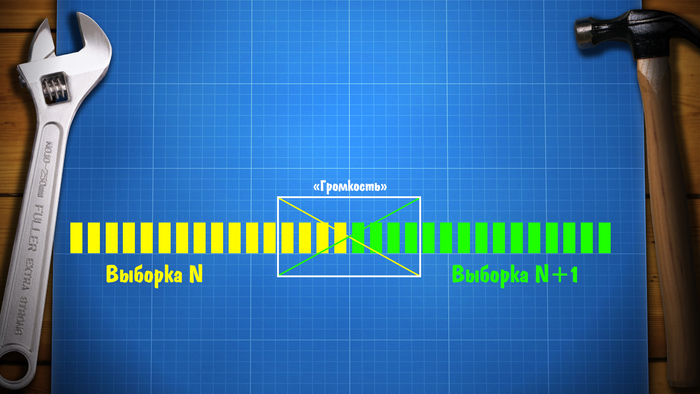
Для сглаживания между выборками будем миксовать громкость при помощи средневзвешенной суммы
Я сделал плату и разместил всё это безобразие внутри респиратора-полумаски

Собсно получилось отлично, результат можно наблюдать на видео в начале поста.
Испытываете дискомфорт, если не заклеили глазок вебкамеры? Считаете что большой брат следит за вами? Тогда вы будете просто в ужасе 😁
Камера назвается Eyecam включает в себя приводимое в действие аниматронное глазное яблоко, веки и подвижную бровь. Устройство состоит из шести серводвигателей, оптимально расположенных для воспроизведения различных глазных мышц.
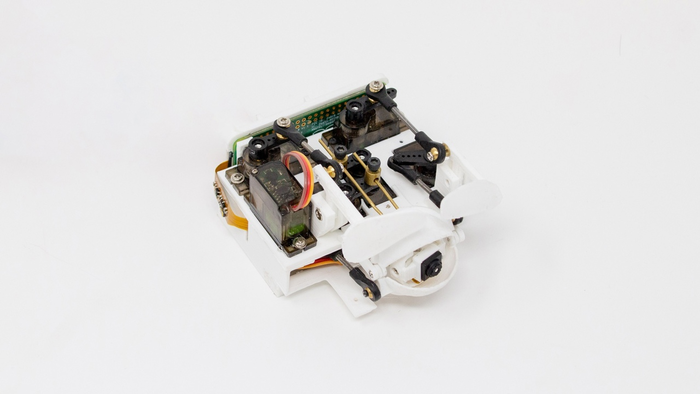
Eyecam умеет моргать подобно настоящему человеческому глазу, а веки динамически адаптируются к движениям глазного яблока: когда камера смотрит вверх, верхнее веко широко открывается, а нижнее полностью закрывается.

Она также может быть полностью автономной и самостоятельной, реагируя на внешние разражители. И все благодаря внедренным в устройство алгоритмам компьютерного зрения, что помогают камере обнаруживать лицо и следовать за ним.

Если не присматриваться, то кожа этой аниматронной камеры очень похожа на настоящую. Она отливается из силикона по специальному слепку.

Волосы брови и ресницы сделаны из настоящих человеческих волос.

Цель этого проекта - размышление о прошлом, настоящем и будущем технологий. Мы окружены сенсорными устройствами. За нами наблюдают камеры наружного наблюдения, микрофоны Google, Alexa, Кортаны или Маруси слушают нас, а веб-камера в нашем ноутбуке постоянно глядя на нас. Все эти фрагменты технологий становятся невидимыми, растворяются в нашей повседневной жизни до такой степени, что мы не замечаем их присутствия и перестаем задавать вопросы о том, как они выглядят, чувствуются и что действуют.
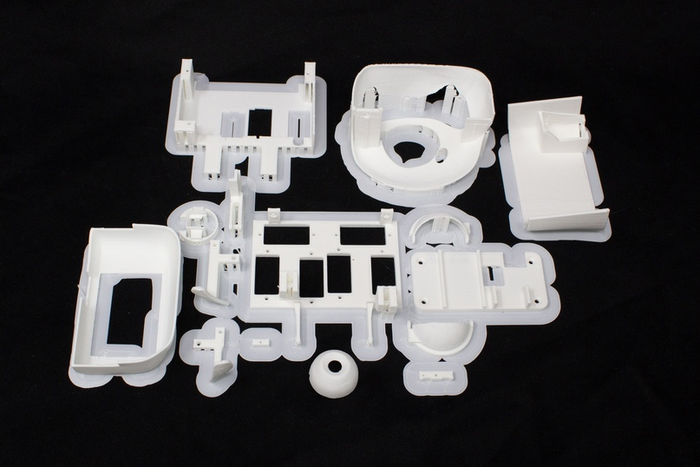
Все пластиковые детали распечатаны на FDM принтере, и требуют лишь минимальной маханической обработки. Проект имеет открытый исходный код, и доступен на гитхаб marcteys/eyecam
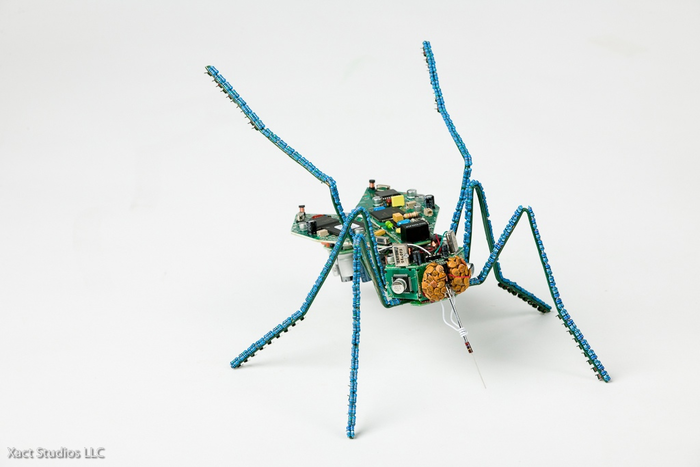
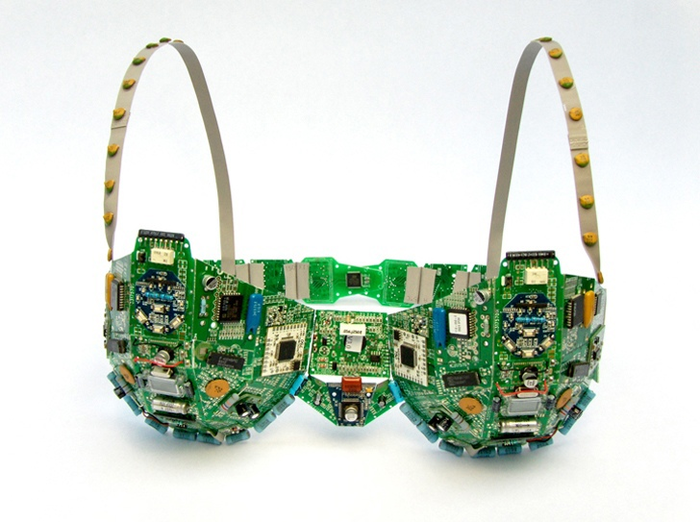
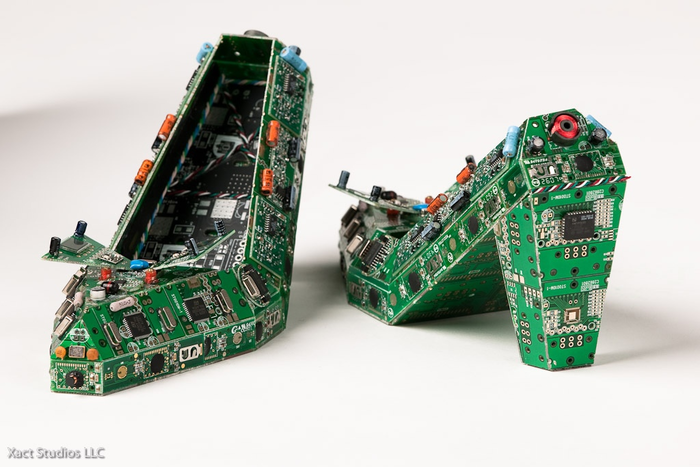
Кубинский художник Стивен Родриг с самого детства интересовался созданием искусства из нетрадиционных материалов. Поэтому ремонтируя компьютеры и другое электронное оборудование, он нашел свой лучший материал. Он взял печатные платы, которые которые уже не вернуть к жизни, и переработал их, чтобы дать им новую скульптурную жизнь 🙂

Таракан уже был на пикабу, но там авторство этой и других работ приписывается Габриэлю Дишоу.
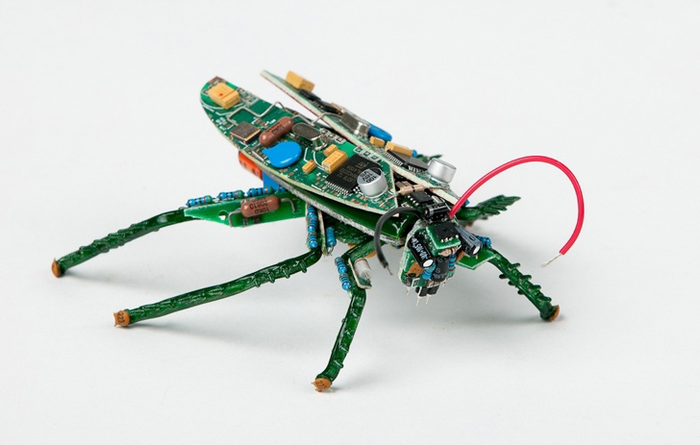
Для особо чувствительных повторю, что все компоненты и печатные платы это не ремонтопригодный демонтаж.