Биотоки
Всем привет. Продолжаем. А теперь коснемся темы биотоков.
Использование биотоков является одним из основных бионических методов управления, но довольно сложно найти какую то простую и подготовленную информацию по этой теме. Сия технология является основой всех биоэлектронных систем и в частности протезов и нейроинтерфейсов.
В настоящее время я вижу три вида сигнала, которые можно где то использовать и которые несут практическую ценность:
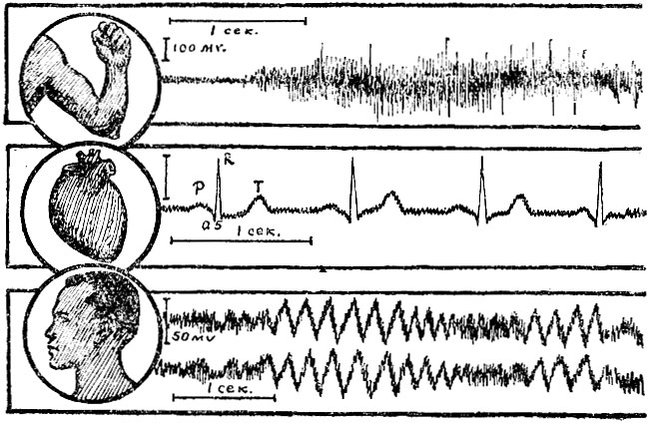
1.ЭМГ — Электромиограмма
Электрические импульсы мышечных сигналов. Мышцы, имеются в виду, опорно двигательной системы. Источником этих сигналов является нервы и в частности нервные клетки. Сами мышцы сигналы не генерируют, но управляются ими.
2.ЭКГ — Электрокардиограмма
Электрические импульсы мышц сердца. Частный случай предыдущих сигналов, но ,по причине жизненной важности органа, выводится как отдельный вид. Я думаю это правильно.
3.ЭЭГ — Электроэнцефалограмма
Электрическая активность мозга. Мозг является биоэлектрической системой с огромным пластом различных сигналов и снятие хотя бы части сигналов дает возможность прямого управления «мозг-устройство».
Первый и самый просто метод это просто специальный шилд для ардуино. Называется такой шилд EKG-EMG Shield. Фото модуля, монетка для определения размера.

Это одноканальный усилитель, позволяющий снять ЭМГ и ЭКГ с очень неплохой точностью. Наличие библиотек и изначальная интегрированность в ардуино также является огромным плюсом. Минусом является одноканальность и большой размер платы.
Одноканальность не позволяет использовать этот модуль для чего то сложного, но позволяет сделать неплохой измеритель сердечной активности.
Второй метод значительно сложней и это самодельный усилительный модуль с неограниченным количеством каналов. То есть можно просто напаивать новые линии до того количества, что будет нужно. И так же и настраивать под что нужно. Фото прототипа восьмиканального усилителя нейротоков.

Схема одного канала .Таких там восемь.

Из плюсов можно выделить что схему можно настраивать под ЭЭГ, ЭКГ и ЭМГ, можно снимать нужные частоты и изменять параметры схемы как нужно. Немаловажным является что при использовании SMD элементов один канал будет примерно 1.5 см куб.
Минус это помехи и тех. недоработки. Схема рабочая, но сырая и требует шлифовки. Требует внешнею арудину для анализа сырых аналоговых данных.
Применять ее можно для все снятия всех видов сигналов и даже для инвазивных исследований. Самый дешевый из всех трех методов.
Третий метод самый сложный, но и самый точный и широкий в использовании. Этот метод заключается в использование специальной микросхемы ADS1299 .Эта микросхема является основой знаменитого проекта OPEN BCI и на ее основе строятся почти все дешевые ЭЭГ и ЭМГ приборы.

Микросхема очень маленькая и очень чувствительная к статическому электричеству. Фото с монетой для понимания размера. Фото не очень, но важно понимание что микросхема очень маленькая и тяжелая в монтаже. Имеет 64 вывода.

Плюсом этого метода можно назвать огромный потенциал микросхемы и отработанность схем на её основе. Кроме того там восемь полноценных входных каналов.
Минус это сложность. Огромнейшая сложность монтажа, но в результате можно сделать устройство принимающее и анализирующие все виды сигналов.
Схема подключения

Микросхему можно подключать к ардуино и, следовательно, использовать и совмещать со всеми модулями.
Все методы требуют подготовки кожи для электродов при неинвазивном использовании и очень хорошей защиты от помех.