Автономная автоматическая турель

Здравствуйте! Представляю вам новую версию турели - автономная с управлением через смартфон.
Для решения задачи перевода турели на дистанционное управление необходимо было заменить ПК на компактный вычислитель и перейти с питания от сети на питание от аккумуляторов.
В качестве вычислителя выбрал одноплатник NVIDIA Jetson Nano Developer Kit B01 из-за наличия двух разъёмов CSI, к которым подключаются камеры Raspberry Pi Camera Board V2 8MP.
Для питания выбрал аккумуляторы LiFePO4. В первую очередь из-за их безопасности. Собрал три батареи:
2s3p + BMS + понижающий регулятор напряжения D24V50F5 для одноплатника,
8s1p + BMS для двух двигателей NEMA17 JK42HS40-1704,
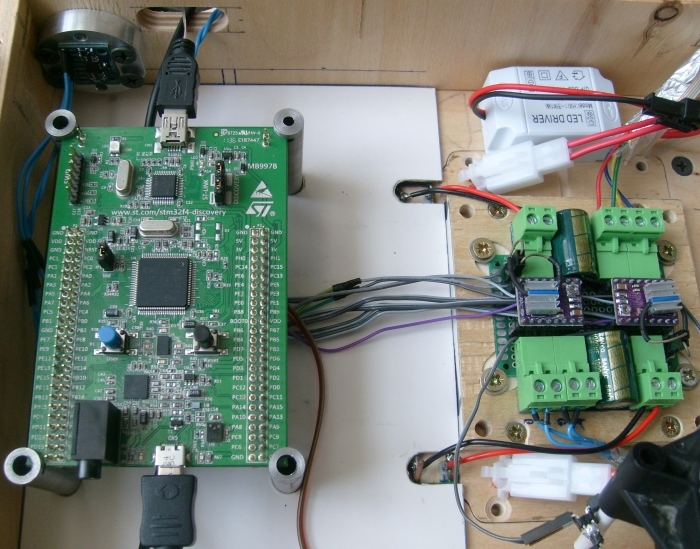
2s1p + модуль питания YwRobot для платы STM32F4-Discovery и драйверов DRV8825
Так как с аккумуляторами имел дело впервые, то батареи сделал разборными, что полностью себя оправдало. Время работы турели до 5 часов.
Для управления было написано приложение на Android. На одноплатнике создаётся точка доступа и сервер. На смартфоне, соответственно, подключаемся к Wi-Fi и потом к серверу.
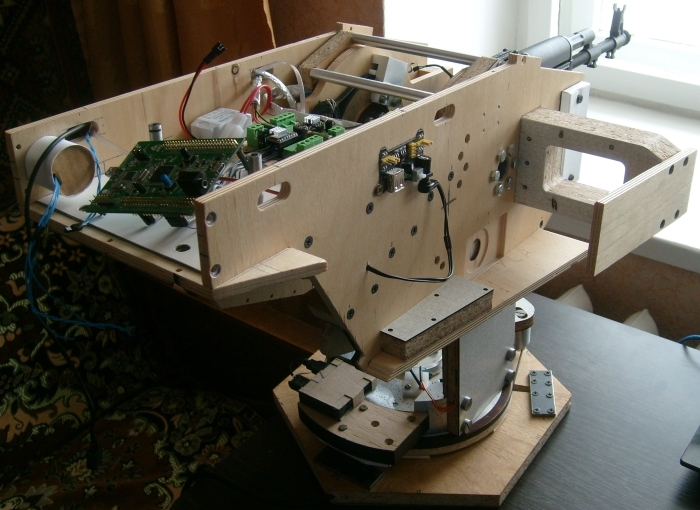
Если раньше у меня под рукой была вся мощь советского станкостроения, то сейчас только лобзик, шуруповерт и напильники. Поэтому конструкцию переделывать не стал. Вместо этого поломал голову над размещением (впихиванием туда) новых компонентов. Магазин используется штатный, что несколько портит внешний вид, нарушая габариты. Также была проведена работа над облегчением деталей из фанеры, что в совокупности с новой компоновкой привело к уменьшению массы противовесов с 2.5 кг до 0.4 кг.

Программное обеспечение писал на Python и C. Немного использовал OpenCV.
Для идентификации человеков используется нейронная сеть архитектуры U-Net. От реализации на GPU, используя TensorRT, пока отказался из-за разброса времени обработки в десятки миллисекунд. В итоге сейчас используется нейросеть собственной реализации на CPU. Летящие цели идентифицируются по контрасту на фоне неба.
При изначальном проектировании не закладывалась возможность нетрудозатратной частичной разборки для переноски. Тем не менее турель очень удачно разбирается на две крупные части: снимается автомат и от основания откручиваются стойки. Существенной потери точности из-за неоднократных сборок-разборок замечено не было. При установке на новое место необходимо заново перестроить базовую систему координат.

Для испытаний стрельбы по летящим целям, в качестве последних были куплены два квадрокоптера SNAPTAIN SP650 общей стоимостью 4500 рублей. Сразу хочу отметить, что квадрокоптер оказался довольно живучим - выдержал множество падений, утопление и стрельбу из турели, запасной не понадобился. Также следует учитывать, что он не может зависать на одном месте. Проведена работа по увеличению площади изображения квадрокоптера в прицеле. На фото можно увидеть лопнувший в местах попаданий корпус.

Пришлось сходить на 10 испытаний, прежде чем турель заработала как надо.
Видео с камеры турели, стрельба по "ростовой мишени" в режиме "навскидку":
Видео с камеры турели, стрельба по летящей цели в режиме слежения:
Видео с камеры квадрокоптера, стрельба по летящей цели в разных режимах:
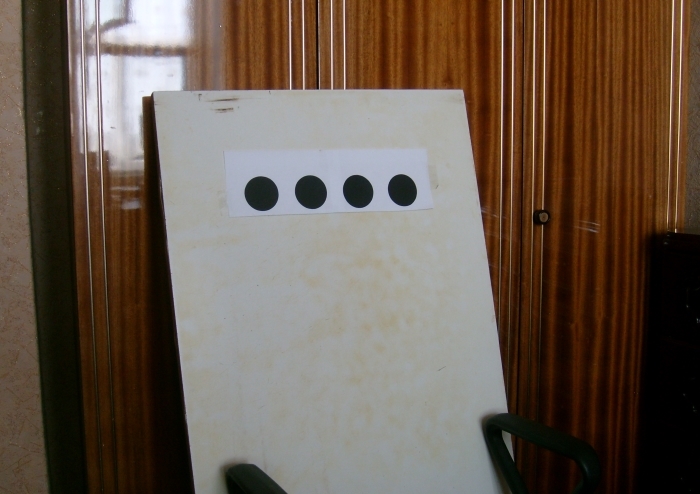
Если рассмотреть покадрово (кадры из другого видео). Первый кадр:

Второй кадр, найди шарик:

Третий кадр, попадание:

Видео с экрана смартфона (оригинал), стрельба по "ростовой мишени" в режиме слежения:
Точность стрельбы по движущейся ростовой мишени на дистанции 30-35 метров составляет 90%, по летящему квадрокоптеру на дистанции 20-25 метров - 30%.
Спасибо за внимание!