Учимся ардуино: модель на радиоуправлении.
Привет пикабу рукодельный.
Недавно я поклялся начать изучать ардуино.
Накупил всевозможных плат, для начала выбрал для разработки среду XOD, как советовал Alex Gyver.
Когда надоело тупо моргать диодами, решил взяться за проект поинтереснее.
Достал с полки детскую машину на RC с надписью MAYKASING на колёсах, вот такую:

Это достаточно некачественная китайская штука.
Пластик ломкий, ещё в детстве, лет 12 назад, он уже откололся.
Аккумулятор не позволял управлять этой штукой долго, зато носилась она резво.
При подсевшем аккумуляторе отказывало рулевое управление - двигатель поворотов не вытягивал нагрузку на пониженном напряжении.
Я решил, что от всех этих недостатков мне поможет избавиться ардуино.
Дальше события развивались достаточно трагично.))
Я перехватил ардуиной управление, установил шесть литиевых банок 18650, залил сырую прошивку, и стал ездить по комнате.
Но, я не учёл некоторых моментов, облажался, и расколотил машину об стену))
Рулевой механизм развалился напроч, после чего я решил, что надо немного доработать прошивку.
Что я вынес из этого:
1)управление ходом должно не только иметь дискретные скорости, но и подсчитывать обороты колёс, чтобы иметь возможность точно поддерживать заданную скорость.
2)нужна команда для экстренной остановки.
3)скорость хода назад должна быть в два раза меньше скорости хода вперёд.
4)уж если мы используем дискретные скорости, нужна примочка для контроля потери управления.
5)не плохо было бы добавить кнопку турбо, при нажатии на которую, тачка включает полный вперёд.
6)мне нужна новая рама.
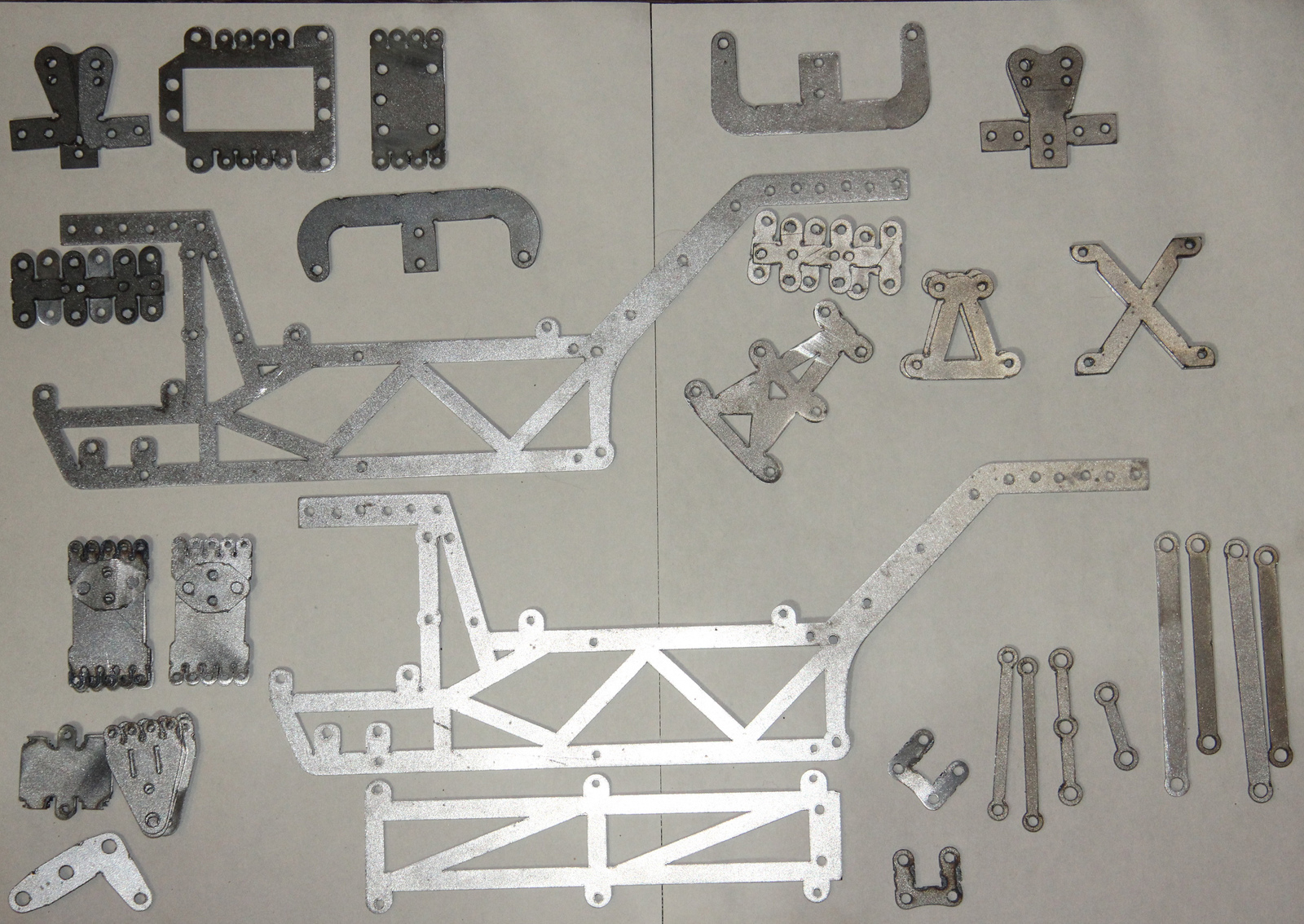
Посидев три денька в CAD, разработал следующую конструкцию:
И рама отдельно:
Модель с сопряжениями, подвеску можно перемещать в любое положение, колёса поворачивать.
Рама выполнена из листовой стали толщиной 1 мм.
Детали пришли из резки, но ещё не все, их более 50 штук, и три штуки или потеряли, или забыли изготовить. Начать собирать можно, но закончить без них не получится.
Ну что же, начну собирать на днях, уже не плохо.
Что касается электронных фишек.
Радиоуправление организовано посредством микросхем TX2 и RX2.
По мануалу там пять каналов, а используется только 4.
В пульте впаяны две дополнительные кнопки, но только они ничего не замыкают, уж не знаю, почему так получилось.
Пятый канал я решил использовать для контроля потери радиоуправления.
Принцип такой - ставим мультивибратор в пульт, который постоянно открывает транзистор.
Транзистор кидает на массу соответствующую ногу от микросхемы TX2, и на приёмной аппаратуре на соответствующей ноге появляется плюсовой сигнал.
Далее этот плюсовой сигнал посредством простейшего резисторного делителя опускается до 5 вольт(логическая единица), и подаётся на цифровой вход ардуино.
Ардуина считает время с начала импульса, если оно превышает 0.15 секунды - включает полную скорость, если не превышает, ждёт следующий импульс. Если импульс не поступает - включается полный стоп, так как произошла потеря управления.
Схему я собрал, пульт исправно тикает приблизительно 4 раза в секунду.
Далее я собирал схему для подсчёта импульсов.
У меня валялись фототранзистор и фотодиод от робота пылесоса, которых я и приколхозил к редуктору.
И вот в ходе обкатки куска программы выяснилась неприятная вещь.
XOD не может обеспечить чтение импульсов с частотой выше 250 герц.
Как я ни старался, использовал разные варианты схемы, при превышении частоты 250 герц начинались пропуски импульсов.
И вот тогда я задумался перейти на нормальную среду разработки.
Была успешна выбрана Atmel Studio, скачана и установлена, но пока к ней я не притрагивался.
Продолжение следует.
 inkvizitorZDESYA
inkvizitorZDESYA