
Простенькие примеры на ПЛИС. UART. Часть 0.
Приветствую уважаемые посетители сайта www.pikabu.ru. Решил продолжить статьи про разработку на ПЛИС. В первом посте я выложил самое начало, с чего стоило бы начать изучение ПЛИС. http://pikabu.ru/story/s_chego_nachat_izuchenie_fpga_plis__4...
Логичнее было бы продолжить постепенно объяснять базовые вещи. Но это был бы очень скучный, долгий и неинтересный материал, который бы только отпугнул и оттолкнул начинающих разработчиков своим объемом и сложностью. И я подумал, а не проще ли сначала показать, на что способна ПЛИС, как ведётся процесс разработки? Поэтому я решил выложить примеры простеньких проектов. А по задаваемым вопросам далее будет видно, какой материал лучше выкладывать.
В этом посте будет рассматриватся формальная постановка задачи написания простейшего приемника RS232, он же COM порт, он же UART*1 интерфейс, он же УАПП – Универсальный Асинхронный Приемо-Передатчик. Выбор пал на COM порт не просто так. Всё дело в том, что этот интерфейс самый простой для изучения и позволяет «подружить» компьютер и ПЛИС, научить их разговаривать друг с другом – передавать данные между собой. Сразу говорю, что полностью объяснять и расписывать все сигнальные линии и всю регистровую модель приемопередатчика я здесь не буду, поскольку для простой организации интерфейса между ПК и ПЛИС это нафиг не нужно. Более того, этого добра навалом во всемирной сетевой помойке и при желании или необходимости вы без проблем найдете всю интересующую вас информацию.
Внимание! Всё, что мною написано - это бред сумасшедшего это мои личные умозаключения, основанные на собственном опыте, на информации из различных источников, достоверность которых весьма спорная. Поэтому я не несу никакой ответственности за возможный вред, нанесенный вашей тонкой душевной организации, трату вашего бесценного времени. Поэтому пока не поздно закройте этот пост. А потом хорошо промойте глаза, желательно с мылом.
Внимание! КАТЕГОРИЧЕСКИ ЗАПРЕЩЕНО подавать сигнал с COM порта компьютера напрямую в FPGA, без специальных преобразователей уровней! В данной статье я не рассматриваю вопросы согласования физических уровней COM порта, и ПЛИС. Исключение составляют виртуальные COM порты, реализуемые на микросхемах FTDI, имеющие уровни сигналов совместимые с ПЛИС.
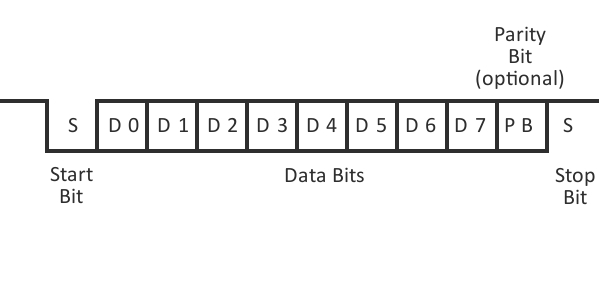
Для начала совсем коротенько расскажу про протокол обмена информацией по COM порту. Вот посмотрите внимательно, на картинку:
Для начала введем некоторые определения. Высокое состояние линии – соответствует логической единице – лог.1. Низкое состояние линии соответствует логическому нулю – лог.0.
Что же мы видим на этой картинке? А мы видим кучу полезной информации, смотрим справа налево:
Изначально линия находится в состоянии лог.1.
Затем мы видим, что линия становится лог.0, на один период данных. Этот бит данных называется СТАРТ-БИТ, применяется для того, чтобы сообщить приёмнику о том, что началась передача одного пакета\кадра\фрейма информации.
После передачи СТАРТ-БИТА у нас начинают передаваться биты данных. Данные предаются ногами вперед начиная с младшего бита. Обычно в одной посылке 8 бит – т.е. 1 байт. Но это не всегда так. Как правило, сколько бит в посылке оговаривается заранее, и приёмник при приёме уже настроен на необходимое количество бит данных.
После того, как все биты данных переданы может передаваться контрольный бит – или его ещё называют бит четности\паритета (от анг parity). Например, если был выбран четный паритет, то после передачи данных, если количество бит данных было четным – передаётся бит паритета равным лог.1. Если количество бит данных было нечётным – то передаётся бит паритета равным лог.0.
При выбранном нечётном паритете всё в точности наоборот: передали нечётное количество бит данных – бит паритета равен лог.1. Если количество переданных бит было чётным – паритета равен лог.0. Бит паритета нужен для минимального контроля принятых данных. Принимая данные, приёмник подсчитывает количество принятых бит. Если паритет подсчитанный передатчиком не совпадает с принятым битом, означает, что произошёл сбой и работать с данными нельзя. Какой тип паритета будет, а также будет ли вообще использоваться бит паритета, опять же оговаривается до передачи данных.
Любая посылка заканчивается стоповым битом СТОП-БИТ. Во время действия стоп-бита линия данных должна находиться в лог. 1.
Был выработан и прижился короткий способ записи параметров передачи, таких, как количество бит данных, наличие и тип бита четности, количество стоп-бит. Выглядит как запись вида цифра-буква-цифра, где:
• Первая цифра обозначает количество бит данных, например, 8.
• Буква обозначает наличие и тип бита четности.
Встречаются:
N (No parity) — без бита четности.
E (Even parity) — с битом проверки на четность.
O (Odd parity) — с битом проверки на нечетность.
• Последняя цифра обозначает длительность стоп-бита. Встречаются значения 1, 1.5 и 2 для длительности стоп-бита в 1, 1.5 и 2 битовых интервала соответственно.
Например, запись 8-N-1 обозначает, что UART настроен на 8 бит данных без бита четности и один стоповый бит. Для полноты параметров эту запись снабжают указанием скорости UART, например, 9600/8-N-1. Если говорить про скорость, обычно говорят про бодовую скорость. Т.е скорость, с которой отправляется посылка, которая определяет период одного бита. Реальная скорость обмена информацией на скорости 9600/8-N-1 будет на 20% меньше, поскольку среди переданных 10 бит информацию несут только 8 бит, а остальные 2 бита это старт и стоп соответственно.
Асинхронным интерфейс называется так же не зря, у нас нет синхросигнала стробирующего данные. И приёмник должен сам синхронизироваться с передаваемыми данными, зная на какой тип передачи настроен передатчик. На этом наше знакомство с интерфейсом UART окончено, этих данных достаточно для реализации простейшего приёмника.
А сейчас я вас немного погружу информацией по ПЛИС, без которой нам не написать правильный приёмник. В частности я расскажу немного про клоковые домены.
Если взять за жабры гугл-переводчик и зпихать в него фразу «clock domain signals» – то он выдаст перевод: clock domain signals – сигналы тактовой области. Если говорить простыми словами то клоковый домен - это часть проекта, работающая на какой-то одной тактовой частоте. Если в проекте используется только одна тактовая частота – значит клоковый домен у нас один. Если тактовых частот две – значит клоковых доменов у нас уже два и.т.д*2.
Первое наперво, что надо уяснить при работе с ПЛИС – это то, что любой сигнал, пересекающий клоковый домен должен быть синхронизирован с клоковым доменом, в котором мы обрабатываем этот сигнал*3. Частный случай пересечения клокового домена – приём внешних данных, которые обрабатываются на частоте порожденной внутри ПЛИС блоком PLL*4 или на частоте тактирования этой ПЛИС от собственного тактового генератора.
Это очень важный момент, который обязательно надо учитывать при проектировании. Представим, что у нас есть проект, в котором, все триггеры срабатывают по переднему фронту. В проекте есть 9-разрядный счётчик, который работает на частоте 40MHz. Данные с этого счетчика поступают в другую часть проекта, работающего на частоте 37MHz. Т.е пересекают клоковый домен. Посмотрим картинку:
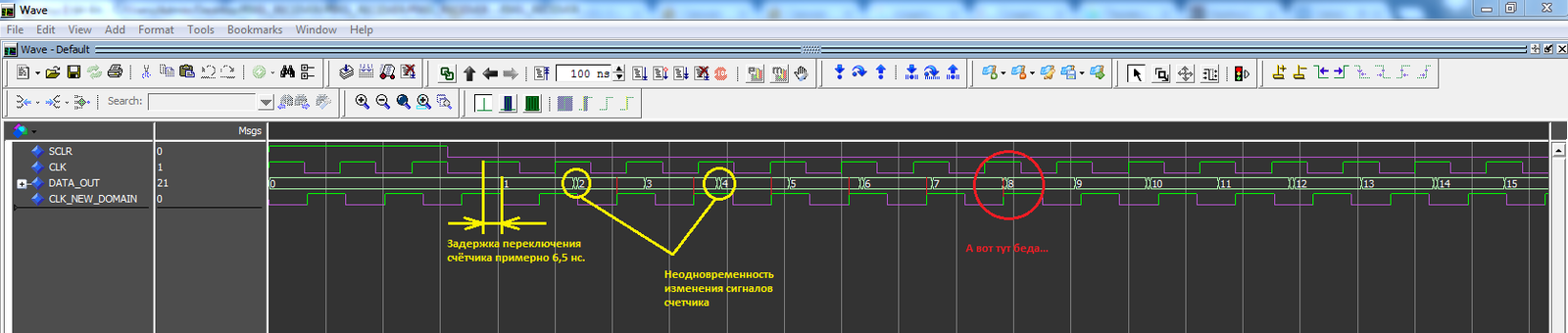
Сигнал CLK – синхросигнал работы счетчика, его частота 40MHz
Сигнал SCLR – сигнал синхронного сброса счётчика. Пока он в состоянии лог.1 счётчик не работает. Очевидно, что когда сигнал сброса прекратит своё действие счётчик заработает.
Сигнал DATA_OUT – выход счётчика..
Сигнал CLK_NEW_DOMAIN – синхросигнал другой части проекта, его частота 37MHz.
Когда сигнал сброса перестанет быть активным, после прихода синхроимпульса, счетчик изменит своё состояние, т.е. переключится из 0 в 1. Причём переключится не сразу, а через какое-то небольшое время. Когда придёт очередной синхроимпульс счетчик переключится из 1 в 2, и.т.д. счётчик же. Обратите внимание, что при переключении счётчика выходные 9 разрядов меняют свои значения не одновременно, а с небольшой задержкой, поскольку физически линии могут иметь разную длину, и разное время распространения сигнала. По одной из 9 линий сигнал пришел раньше, по другой позже, ничего страшного, это реальный мир. Из-за этого в моменты начала переключения счетчика он может выдать абсолютно любые значения, это нормально,
При неправильно сделанном проекте (как у меня на картинке), данные с этого счетчика обрабатываются по переднему фронту синхросигнала CLK_NEW_DOMAIN, например, записываются в регистр. Т.е данные не были правильно перенесены в новый клоковый домен - это серьезная ошибка !
Очевидно что, в зоне отмеченной красным в регистр запишется полная чушь. И поверьте, неправильные данные это меньшее из зол, как правило протоколы верхнего уровня фильтруют ошибочные пакеты. Самое страшное это то, что триггеры, из которых состоит регистр, могут попасть в так называемое метастабильное состояние, когда состояние триггера приняло некую величину промежуточную между состояниями лог.0 и лог. 1, или его выход данных вообще колеблется между ними. Это очень опасно, поскольку один кусок схемы воспримет это состояние как лог.0 , а другой кусок схемы воспримет как лог.1. и схема может выдать результат, которой разработчик даже не предполагал, вплоть до полного зависания схемы и потери работоспособности. Спасет только перезагрузка.
Приведу пример: вы разработали устройство, которое вам приносит тапки, или гладит котика, в зависимости от принятой команды. Но при проектировании этого устройства возможное метастабильное состояние вы не учли. И однажды, когда вы подали устройству команду принести тапки, устройство вместо того, чтобы принести вам тапки, начало с этим тапком гонятся за котиком. Котик очень недоволен!
Чуть более подробно про метастабильное состояние прочитайте тут, https://habrahabr.ru/post/254869/ очень неплохо изложено. Обязательно прочитайте!
Поэтому нельзя просто так взять и передать сигналы из одного клокового домена, в другой. Для того чтобы передать данные между клоковыми доменами их надо синхронизировать с частотой принимающего клокового домена. Блин ну вот напрашивается картинка:
Базовым синхронизатором является обычный последовательный сдвиговый регистр, который тактируется частотой нового клокового домена:

На его вход поступают асинхронные данные ADATA, а на выходе у него данные SDATA синхронные частоте нового клокового домена. Но у этой схемы есть один недостаток: если принимаемый асинхронный сигнал меньше периода синхрочастоты нового клокового домена или равен ей, существует вероятность потерять этот сигнал. Значит, напрашивается самый логичный вывод - приёмник должен работать на частоте большей, чем частота передатчика. Первая ближайшая частота, с которой должен работать передатчик – это частота как минимум в 2 раза быстрее частоты передачи данных.
Внимание вопрос, почему я не могу взять частоту приемника, к примеру, на 50% быстрее бодовой частоты? Ответы оставляйте в комментах.
Итак, частота работы приёмника должна быть выше частоты работы передатчика. А во сколько? В 2 раза, в 3 раза, в 5 раз? Оставим этот вопрос открытым. Далее я немножечко расскажу про ещё одну очень интересную схему, и после этого мы сложим весь пазл, в одно целое.
Представим ситуацию, вы собрались в компанию из 7 тел и решаете, куда бы вам завалиться, культурно отдохнуть. Одна часть решила пойти в бильярд шары погонять, другая часть хочет в боулинг, шары покатать. Альтернатив нет. Очевидно, что вся ваша компания идет туда, куда хочет большинство. Так вот в схемотехнике есть определенный класс схем, которые так же работают по принципу большинства. Такие схемы называются мажоритарные схемы. К чему я это всё пишу. Смотрим на картинку ниже:
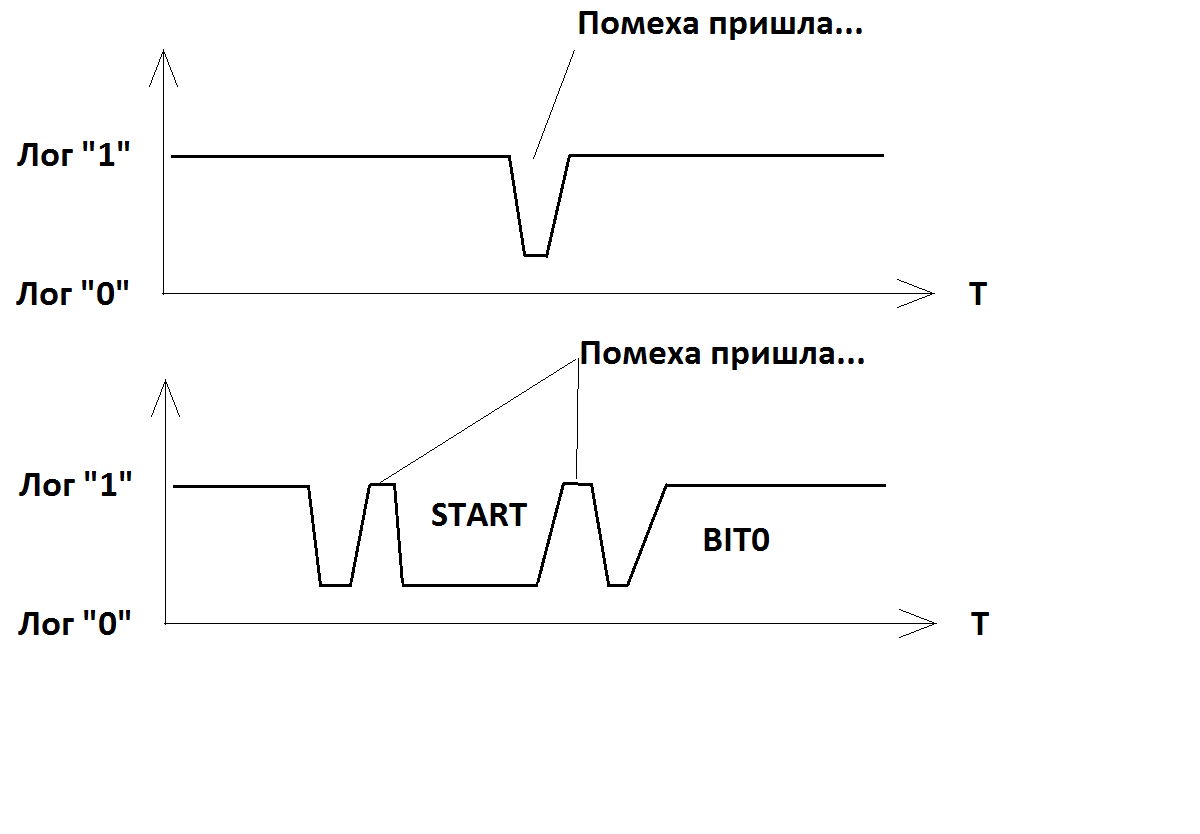
Смотрим на верхнюю половину картинки. Пришла какая-то помеха, которая просадила нашу линию данных до лог.0. Вспомним условие старт-бита - это как раз перепад линии данных из 1 в 0. И если мы обработаем эту помеху как старт, и начнем принимать данные, то мы получим данные состоящие из 8 бит равных лог.1. Очевидно, что это ошибка, поскольку данные мы не отправляли, а приёмник что-то получил. Однако…
А если у нас очень много помех, и старт бит выглядит так, как на нижней части картинки?
Вот тут нам на помощь и приходят мажоритарные схемы: если большая часть времени битового интервала был лог.0, значит, приняли лог.0. Если большую часть времени битового интервала была лог.1, значит, приняли лог.1.
Теперь осталось определиться со временем, которое наш мажоритарный фильтр следит за битовым интервалом. У меня не просто так нижняя картинка со старт-битом была нарисована с 2 пиками помех. Всё дело в том, что очень часто любое изменение линии сопровождается неким высокочастотным звоном, особенно если линия несогласованна. И анализировать данные по краям битового интервала – это не совсем правильный подход. Стараются анализировать линии в середине битового интервала. При этом задача как можно более точно «нащупать» эту середину. Для этого применяют частоту приёмника в 16 раз больше частоты передачи, и примерно в середине бита делают 3 выборки. Почему именно значение 16? Первая причина – это то, что счетчик, считающий от 0 – до 15 это счетчик, который обнулятся сам, когда досчитает до конца, хотя точнее сказать счетчик не обнуляется, а у него происходит переполнение разрядов. Да и схемотехнически такие счётчики, более простые. А вот почему частота именно в 16 раз больше, а не в 8, тут сложно назвать какие-то объективные причины. Так сложилось исторически, и я не стал изобретать велосипед.
Итак, сделаем небольшой вывод:
1. Перед работой с данными мы их синхронизируем сдвиговым регистром.
2. Частота нашего передатчика в 16 раз больше частоты принимаемых данных.
3. В середине битового интервала делаем 3 выборки данных.
4. На основании 3 выборок мажоритарный фильтр делает вывод о значении принятого бита.
Вот картинка поясняющая принцип работы:

DATA_CLK – это частота с которой нам поступают данные. В реальности мы не имеем эту частоту, она показана просто для наглядности
UART_STATE_REG – это данные, которые нам передаются.
CLKx16 – частота работы нашего приёмника.
Красным отмечены места выборок для последующего определения того, что мы приняли.
Наш алгоритм действия можно представить в виде такой вот картинки. Сильно не ругайте, я не умею алгоритмы по ГОСТ рисовать.

Поскольку алгоритм у меня не очень красивый с точки зрения соблюдения ГОСТ, то дополнительно опишу все это словами.
Изначально приёмник следит за линией данных, и сбрасывает счетчик, который считает период битового интервала, и счетчик принятых бит.
Когда приёмник увидел, что на линии лог.0 он перестал сбрасывать счетчики и начинает делать выборки для проверки старт-бита.
Когда сделаны 3 выборки в середине битового интервала приёмник смотрит на то, что выдал мажоритарный фильтр. Если мажоритарный фильтр показал, что пришла лог.1, это означает старт-бит был ошибочный и скорее всего пришла помеха.
Если мажоритарный фильтр показал, что пришла лог.0 , это означает, что был принят старт-бит, и когда закончится период старт-бита, приёмник начнет принимать биты данных.
Изначально счетчик принятых битов равен 0, поскольку когда мы ждали старт-бита мы сбрасывали этот счетчик. При приёме данных в середине битового интервала приёмник опять сделал 3 выборки, и на основании того, что выдал мажоритарный фильтр, записал эти данные в регистр, в котором эти данные будут храниться.
В конце битового интервала приёмник проверил, сколько бит он уже принял. Если не все биты приняты, приёмник увеличит счетчик битов на 1, и совершит ещё один цикл приёма бита данных.
Если же все биты данных приняты, то приёмник начнёт анализировать стоп бит.
Анализ стоп-бита точно такой же, как и прошлые биты.
Вот только если фильтр покажет, что принятый бит это лог.0, значит произошла ошибка, и приёмник выставит флаг ошибки, поскольку стоп бит всегда лог.1. И перейдет в состояние ожидания нового старт-бита.
А если фильтр покажет что приняли лог.1 – значит всё в порядке. Приёмник выставит флаг о том, что данные в регистре правильные, и так же перейдет в состояние ожидания нового старт-бита.
На основании этого алгоритма можно сделать простой вывод о том, какие элементы нам понадобятся для его реализации:
1. Счетчик, считающий от 0 до 15, для того, чтобы можно было определять длительность периода старт, стоп бита, битов данных.
2. Счётчик от 0 до 7, считающий, сколько бит приняли.
3. 3 разрядный регистр, для хранения 3 выборок, чтобы провести голосование.
4. Мажоритарный фильтр.
5. 8 разрядный регистр для хранения принимаемых бит данных.
А ещё нам нужна фиговина которая всем этим барахлом управляет:

Эта вот фиговина называется цифровой автомат и будет управлять нашими счетчиками и регистрами, записывать данные, сбрасывать и пр. Я не буду подробно объяснять работу цифровых автоматов, поскольку это отдельная статья, при чём не маленькая. Чуть подробнее можете с автоматами ознакомиться тута:
https://habrahabr.ru/post/254885/ Вполне годно описано. Для написания простеньких автоматов тут информации достаточно.
На этом моменте я вынужден статью закончить. Поскольку дальнейшее объяснение как это все реализовать внутри ПЛИС и промоделировать потребует серьезного увеличения длины поста. Да и у меня к вам появился серьёзный вопрос. Каким образом мне построить продолжение? Основная проблема в том, что дальше будет достаточно много кода на VHDL. И если его выложить сюда, то он развалится из-за того, что pikabu не содержит тегов для вставки кода. Пока ничего лучше, чем выложить кучу скриншотов кусков кода на ум не приходит. А в конце просто дать несколько ссылок на исходники.
*1. Не совсем корректно так говорить, поскольку RS232 он же COM – это одна из разновидностей UART, написал для упрощения.
*2. Отдельный разговор про частоты, кратные основной, полученные делением на счетчике.
*3. Опять же не совсем корректно так говорить, поскольку существуют специальные алгоритмы, где не сигналы синхронизируются, а синхронизируются флаги валидности данных, так называемые алгоритмы handshake.
*4. Специальная фиговина внутри ПЛИС, которая может создать из частоты, от которой тактируется ПЛИС новую частоту.
id34221550