Всем привет! Хочу немного рассказать о модульном экзоскелете, который стал основой уже многих проектов.
разные вариации экзоскелета pg-20
PG-20 (так называлась эта моделька) - активный экзоскелет ног. Таких экзоскелетов разработано и создано даже мной очень много, но именно эта модель очень важна для всего моего проекта. Я бы даже сказал именно с этой модели начинается новая фаза моих работ.
И чем же он так может быть интересен? Попробую тезисно и кратко всё объяснить.
1.Полная настройка
Экзоскелеты всегда собирались как штучная и очень привязанная к человеку вещь. Разработка экзоскелета похоже на изготовление доспехов под одного и только одного человека. Так бывало чаще всего. Pg-20 изначально разрабатывался как конструктор. Он, да и последующие после него модели (за исключением PG-22 (кисти) ), собран из элементов не более 30 см в длину. Так же важно что все элементы сделаны методом лазерной нарезки (ну или раскройки фрезером). Экзоскелет собирается из многих элементов и скрепляется болтами. На фото ниже пробные ступни этого экзоскелета. Ещё без креплений.
Ступни состоят из 5 пластиковых и плоских элементов, скрепленных болтами и металлическими готовыми уголками.
Длину ног можно регулировать в довольно больших пределах т.к. регулировочных элементов по 4 штуки на ногу. Можно настроить и на ребенка и на взрослого человека. С разными параметрами ног и разным расстоянием от колена до бедра и от колена до ступни.
2.Активный элементы представляют из себя готовый и унифицированный модуль
Активный модуль этого экзоскелета позже перешел и в модель 23, но изначально разрабатывался для модели 20.
Модуль представляет из себя подсумку с аккумуляторами и электроникой, систему управления, 4 полностью независимых друг от друга приводов.
Работа модуля
Все приводы крепятся на мелкие болтики и сдвоены. Это сделано чтобы не создавать смещения при работе т.е. приводы давят на ногу равномерно. Суставы экзоскелета, как можно заметить, это обычные подшипники. Ниже фото колена и коленного привода. Зеленая стропа - крепление к ноге.
А вот так выглядит бедро. Тут можно заметить и бедренный привод и тактический пояс, служащий тут главным креплением к человеку.
Все стропы соединены через кобру. Это самое прочное и удобное соединение.
3.Универсальность и открытость
Этот экзоскелет уже стал основой модели 21. Модель 21 это очень мощный и быстрый усилитель бедренных мышц. Использует уже мощные сервы и сделан из стали…но сделан на основе всех идей что были проработаны в модели 20.
И модели 23. Это пассивный экзоскелет вообще. Нет приводов, но можно подключить активный модуль от модели 20 и будет отличный стальной активный экзоскелет
Модель 20 может даже служить основой для робота, но это уже другая история.
Что можно добавить по итогу?
В прошлом году получилось сделать простой, серийный и если нужно массовый скелет. Его можно распространять и модифицировать как хочется. Теперь нужно лишь улучшать и закреплять успехи этой модели.
Не так давно провел очень интересный опыт со своим нейроинтерфейсом. Нейроинтерфейс новой модели и был доработан до работы с дронами только к концу прошлого года. Но для начала напомню что это вообще такое.
Нейроинтерфейс (или интерфейс «мозг – компьютер») – так называется устройство для обмена информацией между мозгом и внешним устройством. В качестве объекта управления может выступать не только компьютер, но и любое другое электронное устройство: квадрокоптер, система «умного дома», промышленный робот или боевой дрон, экзоскелет и даже искусственные органы чувств.
Нейроинтерфейсы бывают инвазивные и неинвазивные. Инвазивные это те что внедряются в череп. Они очень сложны и опасны в использовании и установке. Мой нейроинтерфейс неинвазивный и полностью безопасный. MS-04D (это версия конца 23 года) является дальнейшей глубокой модификацией модели MS-04C (это версия конца 22 года) . И несмотря на внешнее сходства имеют много отличий.
MS-04D имеет встроенный контроллер ардуино нано. Это позволяет не только быстро изменять и дополнять стандартную прошивку, но и загружать свои алгоритмы анализа.
Встроенный акселерометр гироскоп. Это позволяет определять движение головы. По сути ещё один канал данных .
Собственный протокол N-03 . В отличии от протокола нейроскай более понятен и не зашифрован. К протоколу нейроскай была добавлена возможность работы с lsl.
Ms-04D является одноканальным неинвазивным нейроинтерфейсом . Этот интерфейс снимает ЭЭГ и данные с гироскопа и отправляет его через bluetooth на сопряженное устройство (телефон, пк, иные bluetooth устройства) .Так же возможна работа через USB. Устройство может как проводить простейший анализ само, так и посылать сырой сигнал на устройство.
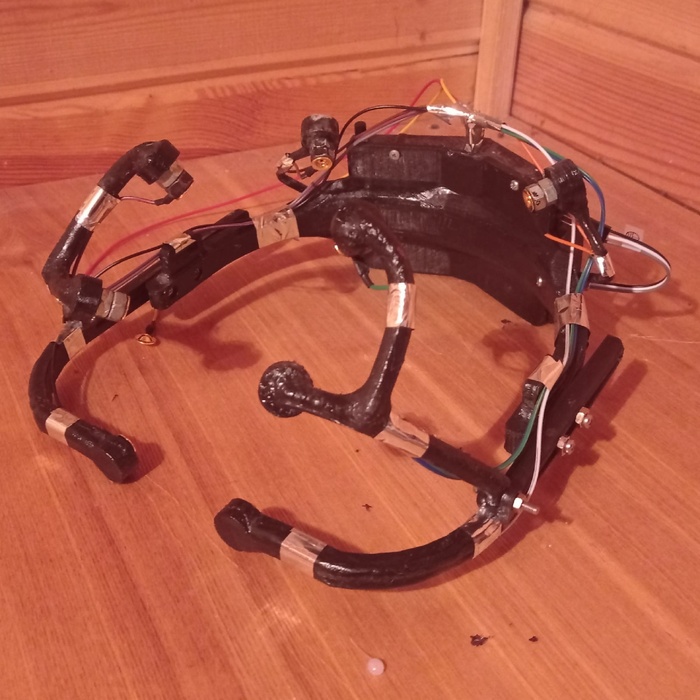
Само устройство сделано пластикового печатного корпуса (пластик petg) и электроники на затылке. Чтобы обезопасить электронику от случайных ударов она закрыта в коробочки. Питание осуществляется через встроенный аккум . Зарядка через usb. Устройство одноканальное. То есть оно снимает сигнал с одной точки на лобной доле. Можно снимать как с правой так и левой доли.
Для съема такого сигнала нужны особые точки относительно которых проходит измерения. В нашем случае это мочки ушей. Там нет эл. сигналов и поэтому на них крепятся прищепки — электроды.
В устройство встроены фильтры шумов и очень мощный усилитель — сигнал проходит всегда.
Анализируется следующая информации :
1.Исходная электроэнцефалограмма (сырец сигнал нужен для протокола lsl)
2.Определяются следующие мозговые волны: Дельта, Тета, Низкие Альфа, Высокие Альфа, Низкие Бета, Высокие Бета, Гамма
3.Данные с гироскопа: Ускорение по трем осям и угловая скорость по трем осям.
Собственно был дрон JJRC H36 Mini. Простой и мелкий дрон с пультом. Работающий через 2.4 ггц радио сигнал. Управлять...довольно сложно , но взлет почти стабильный. Команда на взлет и полет "вперед" осуществляется увеличением интенсивности альфа-ритма мозга. Ну если по простому то при определенном уровне расслаблении и уменьшения концентрации на чем то дрон и активируется. Команды на полет в сторону дает уже бета ритм. Это как раз концентрация. Разная бета - разные стороны полета. Ну и корректировка полета встроенным гироскопом.
Вообще после тренировки с этим всем может справиться каждый. Очень важно чтобы вокруг не было помех только.
Это не первый и не последний нейроинтерфейс. Сейчас ведутся работы уже по улучшению 8 канального и оптимизированного на чтение "мыслей о движении" ( т.к. называемых воображаемых движений с моторной коры). Тут на порядок сложнее всё делается.
Ну и напоминаю что про это всё можно почитать у нас в группе или посмотреть другие нейропроекты у нас в дискорде.
В последние годы эволюция роботов подошла к черте водораздела, породив две уникальные ветки развития: мягкую и жёсткую робототехнику.
мягкий робот
С экзоскелетами произошло то же самое. Так называемый «жёсткий» экзоскелет стал своеобразным эталоном для большинства приборов этого класса. Он повышает силу человека, позволяя поднимать тяжёлые грузы и снимая избыточное напряжение с костей и связок. Разумеется, экзоскелеты вызывают большой интерес у спасателей, пожарных и медиков, которые работают в условиях больших нагрузок. Экзоскелет, в первую очередь, «заточен» под биомеханику человеческого тела и должен работать в плотной интеграции с опорно-двигательным аппаратом носителя. Эта черта выступает основным ограничением для экзоскелетов, но в ней же сокрыт и потенциал их развития.
Контакт тела с плотной деталью экзоскелета быстро вызывает конфликт между ней и живыми тканями. Обойти его можно двумя путями: использовать биологически инертные и нетравматические материалы или же физически разделить человека с роботизированной периферией. Первый подход неплохо показывает себя в деле бионического протезирования конечностей. Второй использовала научная группа, которая занималась разработкой «третьей» руки.
Но кроме силы существуют и другие параметры. В первую очередь — выносливость. Во вторую — ловкость. А вот с ловкостью у «жёстких» экзоскелетов большие проблемы. Сложная система рычагов и приводов, характерная для классического подхода к носимой робототехнике, мало напоминает одежду.
Мягкий экзокостюм не наделяет человека сверхъестественной силой. Вместо этого он поддерживает работу врождённой мускулатуры, позволяя экономить энергию во время марш-бросков и выполнения стереотипных движений. Вместо прибавки к силе он повышает выносливость человека. Функционирование устройства осуществляется по интуитивно понятному принципу. Его суть — помощь в подошвенном сгибании и разгибании голеностопного сустава, а также аналогичных действиях по отношению к бедру.
В биологическом организме движителем выступают мышцы. Сокращаясь, они тянут сухожилия, а те, в свою очередь, передают усилие на кость. Интересен факт, что наши рычаги не слишком эффективны. Точка на кости, где «сидит» сухожилие, расположена вдали от дистального конца руки или ноги. Тянуть рычаг за короткое плечо — значит проиграть в силе. С другой стороны, такая особенность анатомии даёт ощутимую прибавку к скорости движения.
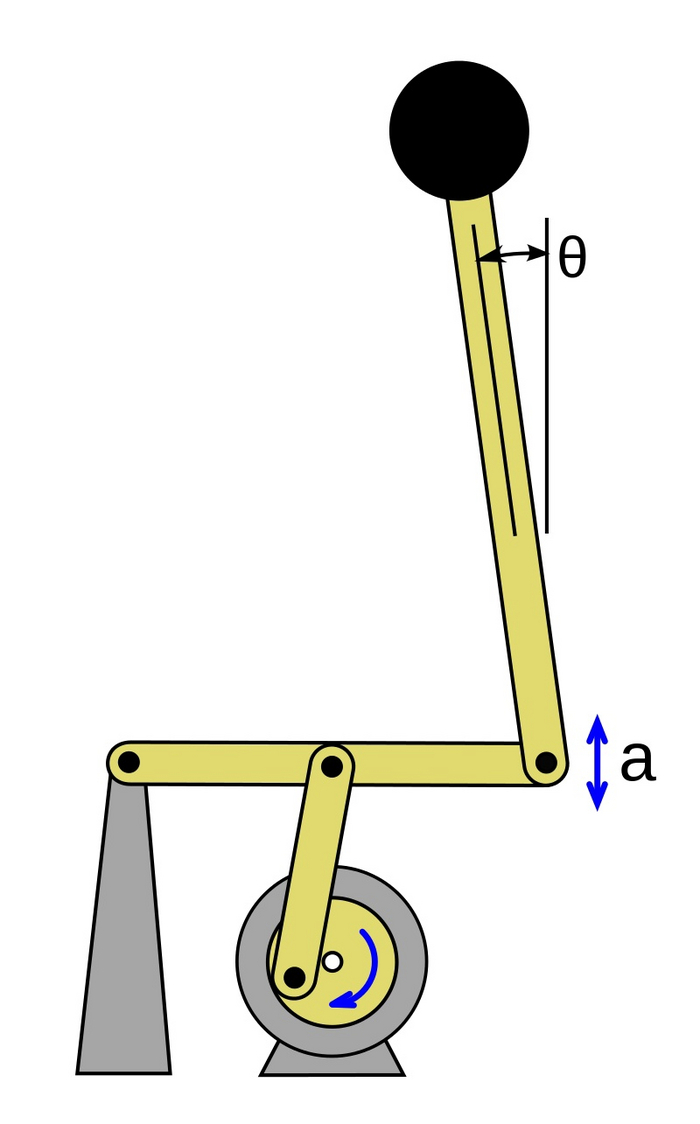
Именно поэтому все наземные животные адаптированы к отталкиванию от поверхности. Но тут возникает новый вопрос: почему человек не опрокидывается во время ходьбы? Посудите сами — наш центр масс расположен достаточно высоко. Во время движения мы переносим точку опоры, регулярно оказываясь в состоянии контролируемого падения.
Если рассматривать стоячего человека как математический маятник, то у него будут две точки равновесия — верхняя и нижняя. Точки равновесия можно описать как состояния системы с наименьшей энергией. При этом равновесие в верхней точке будет неустойчивым и нарушится от любого возмущения. Или нет? Выяснить это наверняка помогает маятник Капицы. Этот прибор поражает своей неочевидностью. Груз, прикреплённый к нерастяжимой спице, соединён с вибрирующим подвесом. В случае цикличных вибраций подвеса по направлению вверх-вниз наш грузик не просто выталкивается в возвышенное положение — он как бы застревает там
Вибрационная механика родилась в тот момент, когда академик Капица сумел разработать математический аппарат для описания уже известных колебательных процессов.Человеческое тело приобретает устойчивость во время ходьбы за счёт колебательных движений голеностопного сустава. Во время шага или бега любой из нас напоминает перевёрнутый маятник, чей центр находится около стопы, а подошвенная поверхность играет роль вибрирующего основания. Центр маятника не стоит путать с центром массы. Наше прямохождение развивалось в ходе долгих эволюционных процессов, но даже они так и не смогли решить проблему возможного опрокидывания человека.
Вернёмся к экзокостюму. Исходя из принципов биомеханики ходьбы, учёные получили возможность прямо влиять на перевёрнутый маятник и даже усиливать его конструкцию.
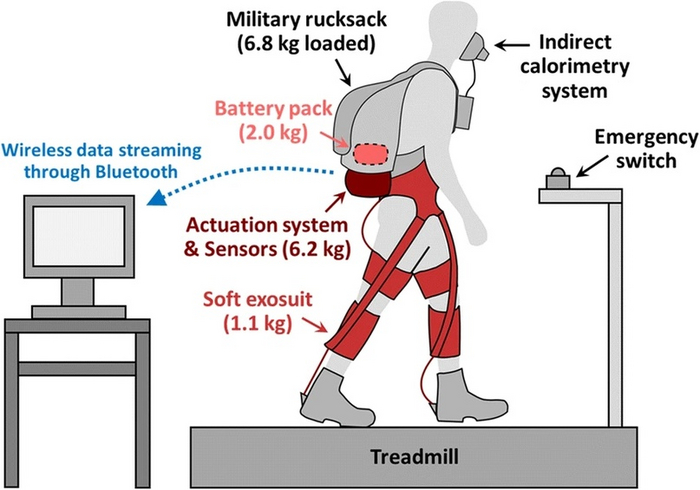
Устройство состоит из двух критически важных блоков: системы срабатывания и передающего комплекса, который транслирует усилие на приборы-исполнители. Первый блок установлен в рюкзаке армейского образца. Тросы Боудена выступают проводником, через который экзокостюм развивает необходимое усилие.
Контроллер функционирует пошагово. Он разбивает программу движения на комплекс итеративных команд. Так обеспечивается многосуставная помощь для сгибания подошвы и разгибания бедра во время шага. Этот метод хорошо показывает себя, когда усилие формируется в соответствующий момент. Для этого был разработан весьма прогрессивный метод онлайн-мониторинга, о котором будет рассказано позже.
Контроль эффективности
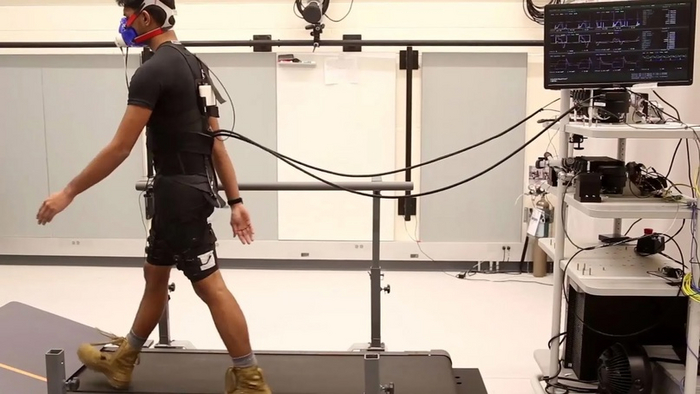
Как определить реальную эффективность костюма? Ответ простой: замерить метаболические затраты человека с этим устройством и без него. Для этого испытуемым предложили идти по беговой дорожке со скоростью 1,5 м/с, неся на плечах рюкзак весом 6,8 килограмм.
Результаты оказались интересными. Начнём с того, что в подобных исследованиях существует множество «подводных камней». Главным, но отнюдь не единственным выступает индивидуальная анатомия. Все люди разные, хоть и относятся к одному биологическому виду. Кто-то экономно расходует энергию, а кто-то прожигает питательные вещества, как мартеновская печь. Следовательно, константа, выведенная для конкретного добровольца, может оказаться мало применимой к другому!
Метод онлайновой настройки параметров позволяет нивелировать этот негативный эффект и динамически адаптировать экзокостюм под потребности конкретного носителя. Для начала исследователи строили положительную карту возможностей. Она описывает спектр воздействий, позволяющих повышать усилие голеностопного сустава и не наносить ему травматических повреждений.
Калибровка экзоскелета
Любой экзоскелет — это устройство для расширения человеческих возможностей. Даже наиболее совершенные гаджеты не могут выступать в роли телепатов. Чтобы механика «разобралась», чего от неё хотят, нужно каким-то образом наладить контакт приводов с нервной системой человека.
Исследовательские группы по всему миру активно работают над разработкой методов управления, но аспекты адаптивной настройки контроллера до сих пор представляют изрядную сложность. Традиционный подход сводится к ручной настройке экзоскелета. Оператор или носитель устройства смотрит на параметры походки, а после вносит исправления. При всей простоте этот метод априори будет субъективным. Значит, оператор должен быть весьма продвинут в работе с программно-аппаратной оболочкой экзоскелета. Более современное решение — отдать часть «скучной» работы на своеобразный аутсорс.
В этом случае на носимом компьютере будут непрерывно обрабатываться сложные алгоритмы, чей список весьма обширен:
Принятие решения, в какой момент направить физическую помощь суставу.
Для этого система должна знать, от чего ей отталкиваться. Метаболические затраты человека можно исследовать разными способами, но самым простым выступает измерение дыхания. По его частоте, глубине, а также концентрации углекислого газа на выдохе можно делать выводы о том, насколько интенсивно протекает энергетический обмен.
Динамические модели передвижения всегда ориентированы под конкретную модель экзоскелета. Вычислительные алгоритмы представлены множеством вариантов. К ним относят обучение пользователя с помощью инструктора, поиск экстремумов и адаптивное динамическое программирование.
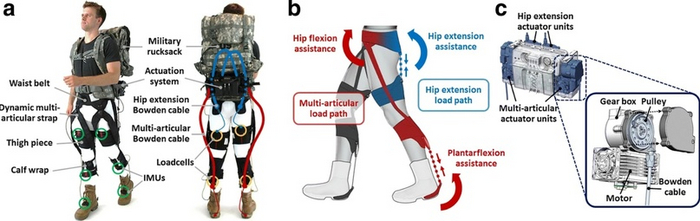
Как уже говорилось в этой статье, многосуставной мягкий экзоскелет облегчает ходьбу через подошвенное сгибание, а также разгибание в тазобедренном суставе. Его компоненты представлены поясным ремнём, двумя набедренными блоками, мягкими подвесами между икрами и передней частью талии, а также специальной обувью. Общая масса всех комплектующих — всего лишь 1 кг 100 г с учётом двух металлических кронштейнов на задниках ботинок.
Устройство активно взаимодействует с ногой через две точки приложения:
Сгибание бедра во время первой фазы отталкивания.
Многосуставное разгибание, после которого наступает новая стадия ходьбы.
На этом изображении видны компоненты экзокостюма и некоторые устройства для аппаратного облегчения ходьбы. А: Красные и синие линии — прокладки тросов Боудена. Толстыми линиями обозначены оболочки, а тонкие показывают ход самих тросов. Зелёные и жёлтые кру
Обратим внимание на исполнительную систему. Её части расположены в рюкзаке. Четыре независимых приводных блока обеспечивают развитие усилия. Механизм-исполнитель представлен безрамным шестиполюсным мотором Emoteq от американской компании Allied Motion Ink. Коробка передач Spiroid обеспечивает передаточное число 38:1 для приводных блоков и 36:1 в случае процесса разгибания бедра.
Исполнительная система передаёт развиваемое усилие на экзокостюм с помощью тросов Боудена. То есть при втягивании струны сокращается расстояние между несколькими точками крепления, которое можно и нужно замерить. Желательно — в режиме онлайн.
Всё это запитано от литий-полимерного аккумулятора весом 2 кг. Его заряда вполне хватает на 8 км непрерывной ходьбы.
На каждой ноге испытуемого расположено по шлейфовому жгуту. Он включает пять инерциальных блоков для динамических измерений: IMU, MTi-3, а также два тензорных датчика LBS200. Эти приборы собирают данные в реальном времени. Блоки инициируют каскад принципиально важных замеров, таких как определение ориентации экзоскелета в плоскости движения, а также угловой скорости каждого сегмента.
Датчики нагрузки идут параллельно с боуденовскими тросами. Они мониторят уровень вспомогательной силы, которая направляется носителю системами экзокостюма.
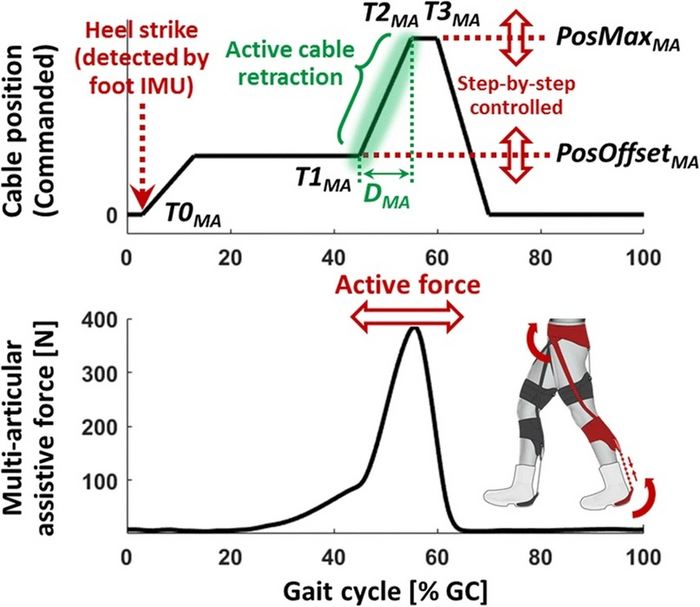
Экзокостюм обеспечивает поддержку ходьбы, втягивая тросы Боудена синхронно с движениями в суставе. Профили положения троса рассчитываются исходя из четырёх параметров: Т0, Т1, Т2 и Т3. Каждый из них занимает определённую процентную величину в цикле ходьбы. Следующие параметры, PosOffset и PosMax, можно получить, выполнив комплекс итеративных вычислений во время работы устройства.
На этом изображении представлены данные о работе многосуставного контроллера. Вверху обозначен профиль положения боуденовского троса. Результирующий профиль, через который выражена вспомогательная сила, можно видеть ниже.
Уделим немного внимания разбору этих циклов:
Т0 определяет пределы цикла походки и время запуска контроллера.
Т1 — точка активного втягивания троса.
Т2 выражается в момент завершения активного втягивания — то есть когда механика прекращает адаптивную помощь.
Отпускание троса закодировано в Т3.
Соответственно, PosOffset проявлена в точке Т1 выражает максимальное вытягивание троса Боудена, а PosMax — экстремум, при котором струна оказывается полностью втянута. Он длится от Т2 до Т3.
Удар пятки о поверхность — момент, в который запускается работа экзокостюма. Львиная доля помощи во время фазы отталкивания осуществляется именно в виде реакции на этот триггер. Зелёный цвет выделяет фазу активного втягивания троса. Параметры этой фазы определены промежутком между Т1 и Т2. Настройка параметров управления происходит в тесной интеграции с данными об увеличении развиваемого усилия.
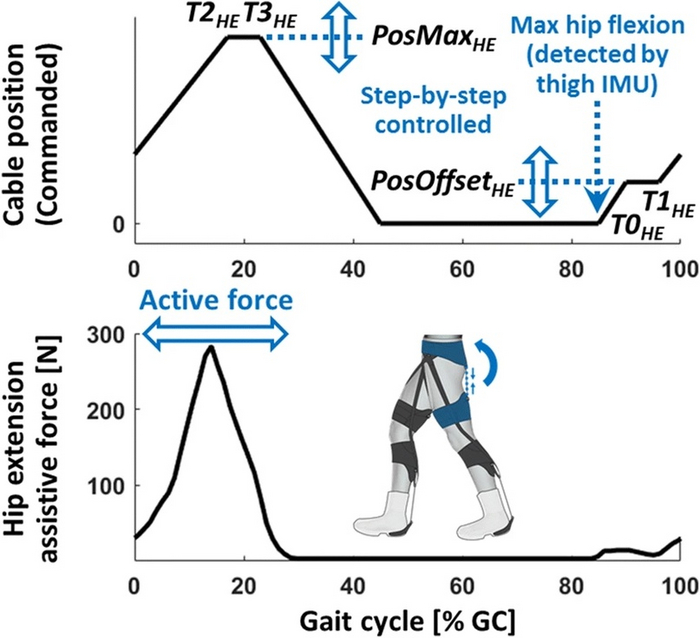
Эта иллюстрация демонстрирует репрезентативные данные о работе контроллеров сгибания бедра. Вверху показан профиль положения троса Боудена. Снизу — результирующий профиль вспомогательной силы. В данном случае поддержка разгибания начинается с выявления точ
И здесь мы подходим к более сложному вопросу: механизму работы контроллера, который следит за нагрузкой в нескольких суставах. Сначала происходит удар пятки в нижней точке траектории. Это не остаётся незамеченным для гироскопа. Такое событие выступает триггером для запуска многосуставного контроллера Т0МА. Тогда включается двигатель, обеспечивая втяжение троса со скоростью 394 мм/с. Такое значение удалось получить в ходе многочисленных испытаний. Если скорость будет ниже, то экзоскелет и носитель начнут работать вразнобой. При ускорении втягивания возникает иной риск — вызвать сгибание до того, как оно понадобится в следующих фазах ходьбы. В таком случае возможно падение человека, а подобных инцидентов следует избегать.
Таким образом устройство достигает PosOffset и сохраняет положение до начала активного втягивания троса в Т1. Оно будет длиться вплоть до PosMaxМА, чья финальная точка — положение Т2.
Затем контроллер фиксирует положение троса, пока тензодатчик не распознает падение силы носителя, которое проявляется во время сгибания голеностопного сустава. Выяснив, что сейчас человек готовится к новому шагу, экзокостюм начинает отпускать трос.
Скорость выпускания зависит от ритма ходьбы. Её верхняя граница — 606 мм в секунду, пока система не достигнет нулевого положения. В нём трос пассивно повисает, чтобы испытуемый не испытывал затруднений при повороте тела и смене траектории. На этом цикл активной помощи можно считать завершённым. После удара пяткой он снова запустится, проходя те же самые итерации.
В конце каждого шага контроллер динамически определяет, уменьшить или увеличить PosOffset PosMax для следующего шага. Это решение принимается исходя из сравнения желаемой и измеренной силы. Учёные экспериментально выявили, что оптимальной пиковой силой в PosOffset будет 75 Н, которая будет приложена во временной промежуток между Т0 и Т1. PosMax обеспечивает пиковую силу в 400 Н между Т1 и Т3 соответственно. Выходит, 400 Н — это и есть выигрыш в силе, которая проявлена во время активного втягивания кабеля.
Это устройство предназначено для помощи в походке, когда разгибательная мускулатура бедра проявляет наибольшую активность. Нюансы биомеханики таковы, что максимальное сгибание бедра наступает на 12% быстрее, чем контакт пятки с поверхностью. В этом случае Т0 соответствует отметке в 0% от полного сгибания бедра. С этого момента двигатель начинает втяжение троса со скоростью 800 мм/с, пока система не достигнет PosOffset.
Такое состояние поддерживается, пока ползунок не заполнится до 7%. От 7 до 28% наступает повторное втяжение троса, которое закончится PosMax на 28%. Пройдя немного больше четверти глобального цикла, контроллер дожидается 34% сгибания. В этот момент наступает следующая фаза работы: отпускание троса со скоростью 800 мм/с.
Контроллер разгибания бедра обеспечивает поддержку в 10 Н в PosOffset между Т0 и Т1, которая переходит во взрывное увеличение силы до 300 Ньютонов между Т1 и Т3. Звучит неплохо, но многосуставная помощь требует калибровки под конкретного человека. Здесь в полной мере раскрывается потенциал онлайновой настройки параметров управления, благодаря которым получится обеспечить максимальную силу, развиваемую в голеностопном суставе. Этот показатель имеет явную корреляцию с метаболическим преимуществом, ради которого и был начат столь прорывной эксперимент.
В цикле ходьбы существует великое множество важных точек. Из него экспериментаторы особенно выделяют два параметра: Т1 и DMA, который рассчитывается по простой формуле DMA = Т2МА — Т1 МА. Следовательно, через DMA выражена продолжительность активного втяжения троса.
Показатели Т1 и DMA лучше всего отображают состояние троса во время активной фазы отталкивания — следовательно, именно в этот момент экзокостюм сообщает большую часть силы голеностопному суставу. Исследователи разработали весьма аскетичный алгоритм, позволяющий наблюдать критически важные параметры ходьбы в режиме онлайн. Настройка занимала 15 минут, пока испытуемые ходили по беговой дорожке. Многосуставной контроллер не сидел без дела, активно замеряя 16 параметров, а также отыскивая те настройки, при которых адаптивная помощь даст максимальный прирост силы.
Всё начиналось с проверки четырёх стартовых условий, при которых Т1 изменяется в пределах 35, 40, 45 и 50% от глобального цикла сгибания бедра. В это же время DMA оставался неизменным на протяжении начальных 15% временного интервала. Среди этих четырёх значений устройство находило такую настройку адаптивной помощи, при которой лодыжка развивает максимальное усилие. При этом экзокостюм получил ряд ограничений, не дающих развивать прирост силы более 400 Ньютонов.
Повторяя эти проверки каждые 2,5-5,0% от длительности цикла, программная оболочка находила значения, при которых прирост силы укладывался в заданные коридоры. Преимущества такого алгоритма состоят в его простоте. Процесс тонкой настройки состоял в динамической смене двух параметров управления. Каждая математическая развёртка по двухмерной матрице учитывала лишь один параметр, а второй оставляла неизменным.
Существуют и другие методы проводить этот комплекс алгебраических вычислений, но такой подход позволял выяснить, в какой мере изменение одного параметра влияет на все остальные процессы во время ходьбы.
Тестирование
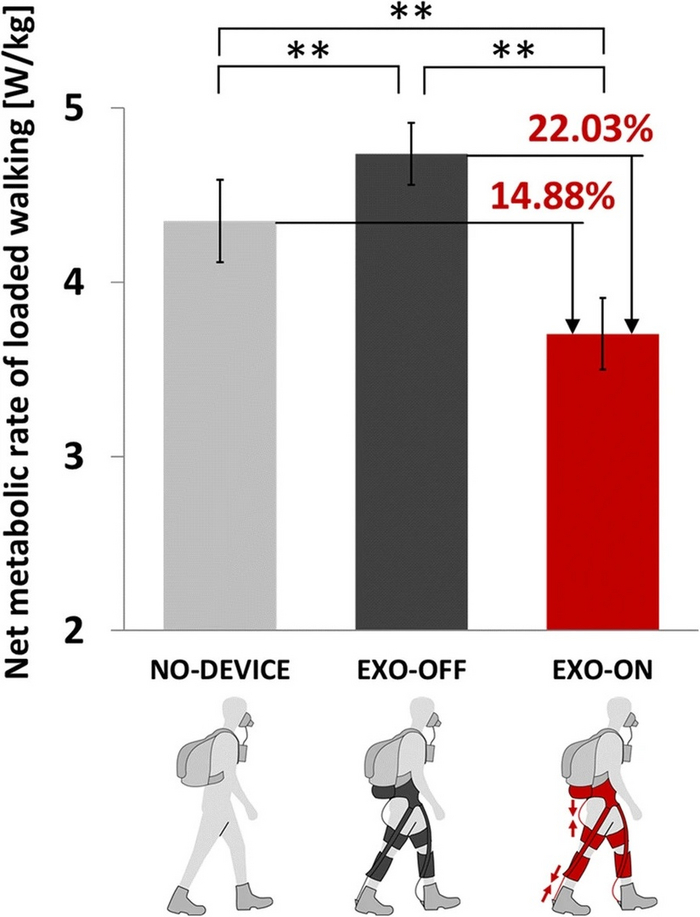
Тестирование экзоскелетов включает ходьбу с нагрузкой без экзокостюма, с отключенным устройством и те же самые действия при включенном гаджете.
Для чистой скорости метаболизма и процентного снижения его интенсивности учёные выявили два важных критерия. Ими стали межсубъектное среднее значение и стандартная ошибка среднего значения. Двусторонние парные t-тесты определили статистическую значимость для разницы в чистой скорости между двумя состояниями.
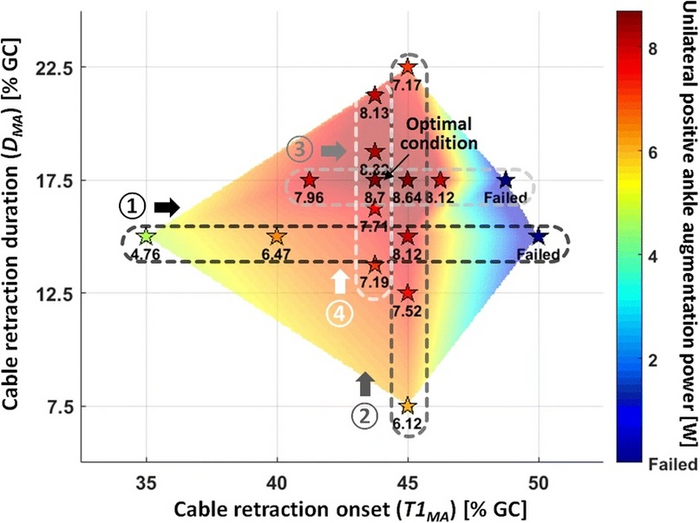
На следующем рисунке можно видеть положительную карту возможностей для увеличения силы, развиваемой в голеностопном суставе:
Так выглядит положительная карта мощности во время настройки контрольных параметров. Звёздочки отражают условия, за которыми наблюдали системы контроля. Числа под каждой из них — положительная односторонняя мощность усиления. Она выражена в ваттах. Стрелки
На следующей картинке показаны параметры управления для конкретного испытуемого, найденные методом адаптивной настройки параметров по результирующим профилям. Начало втягивания троса у пользователя происходило во время фазы Т1 или 43,75-46,25% цикла ходьбы. При этом DMA варьировалась от 13,75 до 22,5%. Эти различия неизбежно приводят к возникновению широкого диапазона профилей силы.
Использование многосуставного мягкого экзокостюма существенно улучшает энергетические затраты на переноску грузов. Как видно из приведённых данных, включенное устройство экономит до 15% энергии носителя и понижает скорость его метаболизма на 20-24%:
Здесь показаны метаболические затраты на переноску груза, собранные по данным трёх статистических выборок. Сплошные столбцы отображают усреднённое значение чистой скорости метаболизма. Двойные звёздочки указывают, что разница между двумя условиями (работа
Экзоскелет оказался жизнеспособным. Он принёс явную метаболическую пользу, сделав движения носителя менее затратными.
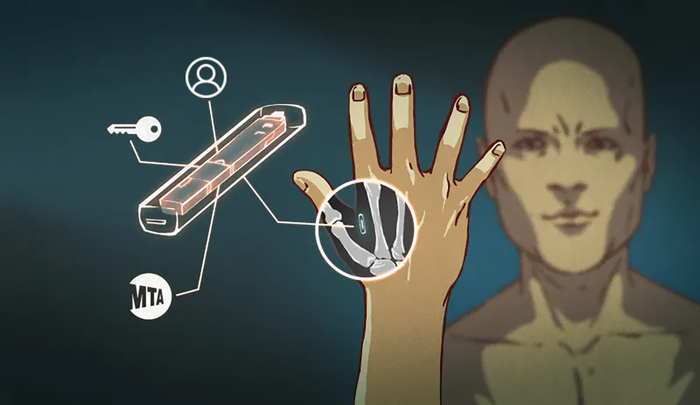
Привет, Пикабу . Хочу вам рассказать о RFID имплантах и показать кое что...
RFID импланты это идентифицирующее RFID-устройство с интегральной схемой, заключенное в силикатное стекло, которое используется для имплантации в тело человека. Этот тип подкожного имплантата обычно содержит идентификационные данные, которые могут быть связаны с информацией, содержащейся во внешней базе данных, такой как личных данных человека, правоохранительные органы, история болезни, лекарства, аллергия и контактная информация
Первые эксперименты с RFID-имплантатом были проведены в 1998 году британским учёным Кевином Уориком. Его имплантат использовался, чтобы открывать двери, включать свет и использовать лифт в пределах дома. Через девять дней имплантат был удалён и с тех пор находился в Музее науки (Лондон).
16 марта 2009 года британскому учёному Марку Гассону был вживлён стеклянный имплантат с RFID-меткой. В апреле 2010 года команда Гассона продемонстрировала, как компьютерный вирус с помощью беспроводной связи может заразить его имплантат, а затем передавать данные в другие системы. Гассон рассуждал, что благодаря технологии чипирования человека разделение между человеком и машиной может стать теоретическим, так как микрочип-имплантат может восприниматься человеком как часть его тела. Следуя такому пониманию Гассон стал первым человеком, заражённым компьютерным вирусом. Марк Гассон не планирует удалять свой имплантат
Есть несколько потенциальных областей применения таких устройств:
Медицинские карты
Исследователи приходят к выводу, что при использовании имплантированных микрочипов в медицине существуют потенциальные выгоды и риски.
Destron Fearing, дочерняя компания Digital Angel, разработала технологию для VeriChip. В 2004 году микрочип-имплант и считыватель VeriChip были сертифицированы в США. В том же году контролирующие органы США опубликовали проект руководства, описывающего меры контроля, необходимые для продажи и вживления таких микрочипов. Устройство размером с рисовое зерно обычно имплантировали в область между плечом и локтем правой руки. После сканирования чип ответил уникальным 16-значным номером, который затем можно связать с информацией о пользователе, хранящейся в базе данных для проверки личности, доступа к медицинским картам и других целей.
Защитники конфиденциальности выражали обеспокоенность по поводу возможного злоупотребления информацией, хранящейся на чипе. При этом некоторые предупреждали, что обязательное чипирование человека может привести к нарушению гражданских свобод, а также краже личных данных в случае взлома имплантата. Другая этическая дилемма, возникающая в связи с этой технологией, заключается в том, что микрочипы-имплантаты были бы полезны людям с деменцией. Однако от таких пациентов сложно получить информированное добровольное согласие на процедуру вживления.
В июне 2007 года Американская медицинская ассоциация заявила, что «имплантируемые устройства с RFID-метками могут помочь идентифицировать пациентов, тем самым повышая безопасность и эффективность ухода за ними. А также могут использоваться для обеспечения безопасного доступа к клинической информации пациента». Но в том же году начала появляться информация о возможной стимуляции развития раковых клеток у людей с вживленными микрочипами, что существенно повлияло на распространённость подобного рода имплантатов.
Ключи доступа и безопасности
В феврале 2006 года CityWatcher из Цинциннати (штат Огайо) стала первой компанией в мире, которая внедрила микрочипы своим сотрудникам в рамках собственной системы контроля доступа и безопасности. Рабочим нужны были имплантаты, чтобы получить доступ к защищённым помещениям, где хранились конфиденциальные данные. Проект был инициирован и реализован Six Sigma Security, а корпорация VeriChip продавала имплантаты, запрограммированные на ограничение доступа к защищённым объектам.
Основным недостатком таких систем безопасности является относительная лёгкость, с которой 16-значный идентификационный номер, содержащийся в чип-имплантате, может быть получен и клонирован с помощью ручного считывающего устройства.
В 2018 году датская фирма BiChip выпустила микрочип-имплант нового поколения, который предназначен для считывания с расстояния и подключения к Интернету. Компания выпустила обновление для своего имплантата, чтобы связать его с криптовалютой Ripple, что позволит совершать платёжные операции с помощью микрочипа.
Возможные будущие применения
В 2017 году Майк Миллер, исполнительный директор Всемирной ассоциации олимпийцев, обсуждал возможность использования таких имплантатов у спортсменов. Целью была борьба с проблемами, связанными с употреблением допинга.
Теоретически чип с поддержкой GPS может позволить отслеживать людей в режиме реального времени. Такие имплантируемые устройства GPS в настоящее время технически неосуществимы. Так как GPS чип слишком велик для имплантации в руку, он будет имплантироваться в мозг и иметь ряд других полезных функций нейрокомпьютерного интерфейса.
Поскольку современные методы оплаты основаны на технологиях RFID и NFC, считается, что имплантируемые микрочипы, если они когда-либо станут популярными в использовании, станут частью «безналичного общества».
Звучит странно, но эти устройства уже можно поставить и самому. Сообщество биоников и установщиков таких имплантов в России увеличивается и технологии становятся все доступнее.
В нашем телеграме можно увидеть весь процесс установки такого импланта!
Давно не было постов о бионике и трансгуманизме, но за это время наше сообщество ни только не загнило, но и наоборот очень выросло и развилось!
Напомню что наше сообщество служило и служит очень простой цели - развитие бионики. Это создание экзоскелетов, нейроинтефейсов, протезов и всего такого. Но кроме создания материальных проектов мы также помогаем новичкам "вкатиться" в нашу тематику и прорабатываем теорию. Например вот книга Подарок для биоников! И я хотел бы попросить помощи. Нам нужны волонтеры. Мы начали собирать все наши знания в одну энциклопедию на вики движке.
Для работы над нашей вики http://wiki.exomech.ru требуются: 1.Люди разбирающиеся и умеющие заполнять вики. 2.Создатели и разработчики собственных проектов, а также участники проектов по робототехнике, бионике, электротехнике, биологии, медицине, нейроинтерфейсам и прочим пересекающимся с нами темам. 3. Люди занимающиеся наукой, пишущие научные статьи, изучающие научные статьи, занимающиеся изучением чужих исследований и проводящие собственные исследования. 4. Любой желающий кто заинтересован в развитии сообщества, развитии науки и техники и желающий популяризировать данное знание. Все кто хотел бы писать статьи по тематике сообщества и кому есть о чем написать, все кто желает присоединиться к нам на правах разработчика и все те, кто уже присоединился и принимает участие в сообществе, а также те кто занимается изучением наших тематик и смежных с нами тематик и желает структурировать полученное знание чтобы оно не пропало зря!
Наша вики это такой же открытый проект, как и наше сообщество. В заполнении и работе над вики может принять участие любой желающий. Поэтому мы призываем всех тех, кто не желает чтобы ценное знание пропало зря и пылилось на страницах истории в древних советских учебниках, присоединиться к нашему проекту!
Это очень важно. Как обычно желающие могут добавиться к нам в дискорд через вот этот инвайт
Хочу кое что подарить всем кто интересуется бионикой .Подарок в честь 6-летия группы и, можно сказать, нашего сообщества! Электронная версия моей книги о бионике и краткий курс по экзоскелетам! Всё без регистрации и СМС.
Из этой книге вы узнаете о истории бионики и её методах. О том как происходит бионический анализ объекта. О том что бионика дает нам сейчас - экзоскелетах, нейроинтерфейсах и имплантах. О искусственном счастье и архитектурной бионике. Узнаете о киборгизации и русском экзоскелетом сообществе. Начнете понимать суть трансгуманизма и идей контролируемой эволюции. Увидите что синтетическая жизнь это не так сложно и 3D биопечать не такая уж хитрая технология. Вот тут лежит книга https://disk.yandex.ru/i/wkf4Invllz2Yig
Курс же ответит на все вопросы о экзоскелетах и нейротехнологиях, которые могут возникнуть у интересующего нашей тематикой человека. Системы управления активного скелета, кинематика пассивных скелетов, виды нейроинтерфейсов и многое-многое другое очень простым языком! Вот тут лежит курс https://disk.yandex.ru/i/2EDl45h2GrLXdQ
Подобной литературы в России крайне мало увы. Сохраняйте и распространяйте!
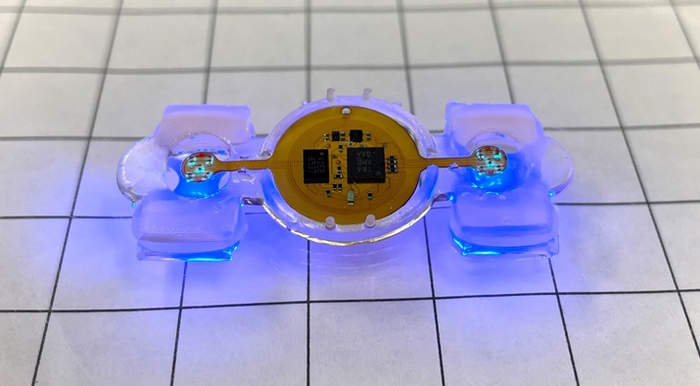
Учёные из Университетов США и Китая в своей работе описали процесс интеграции светочувствительной биологической ткани, натянутой на каркас из гидрогеля, с беспроводным оптогенетическим датчиком. eBiobot — это первая беспроводная биогибридная машина, сочетающая в себе биологические ткани, микроэлектронику и мягкие полимеры, напечатанные на 3D-принтере.
Оптогенетика включает в себя клетки, которые являются или были сделаны чувствительными к свету. В данном случае исследователи сделали мышцы мышей восприимчивыми к свету, чтобы ткани сокращались при освещении.
Источником света является микросветодиод. Он активируется путём передачи энергии по беспроводной сети через радиочастотное излучение, которое можно собирать с помощью резонансной магнитной индукции (используется для беспроводной зарядки электромобилей) через антенную катушку.
Собранная энергия активирует встроенные микро-светодиоды, которые вызывают сокращения мышц, приводящие в движение всю конструкцию. При этом минироботы eBiobot очень медленные – они движутся со скоростью 0,3-0,8 мм/сек в зависимости от количества светодиодов.
Исследователи заявили, что эта работа прокладывает путь к классу биогибридных машин, способных сочетать биологическое восприятие с компьютерными вычислениями. По их словам, проект «открывает огромные возможности в создании самовосстанавливающихся, развивающихся и самоорганизующихся инженерных систем». На данный момент учёные рассматривают возможность применения этой технологии в медицине и окружающей среде.