


ClockPunk Girls




Показать полностью
4
Clockpunk от NASA: венерианский ровер с механическими мозгами
АВТОР: KIZHIFOX · 13 ИЮЛЯ, 2020
6 июля NASA объявило результаты конкурса по созданию концепта ровера, который смог бы исследовать поверхность Венеры. Конкурс «Exploring Hell: Avoiding Obstacles on a Clockwork Rover», запущенный в феврале 2020, стал частью программы AREE — Automaton Rover for Extreme Environments, проекта Института передовых концепций NASA, занимающегося разработкой радикально новых прорывных идей. Этот конкурс ставит задачу разработать полностью механические датчики для автоматического преодоления различных сложных препятствий.
Целью проекта является создание ровера, способного работать в экстремальных условиях — там, где электроника не способна функционировать. Например, такой ровер можно было бы отправить на поверхность Меркурия, где температура поверхности может достигать 430 °C, высадить на Европу или Ио, где высокий уровень радиации затрудняет использование традиционной электроники, или же, на что в проекте делается основной упор, использовать для изучения Венеры, где адские условия в виде огромных температур, достигающих 480 °C, и гигантского давления в 93 атмосферы, превращающего нижние слои атмосферы буквально в полужидкий океан углекислого газа, не позволяют электронике проработать дольше, чем пару часов.
Колоризированное фото аппарата Венера 13, поставившего двухчасовой рекорд времени работы на поверхности планеты
Единственным вычислительным устройством, способном работать в таких жёстких условиях, является аналоговый компьютер. Аналоговый компьютер не является чем-то из разряда фантастики — первые вычислительные устройства, создававшиеся ещё с XVII века, были именно аналоговыми приборами и, несмотря на это, способны были производить достаточно сложные вычисления. Например, планиметр — прибор для определения площади кривых поверхностей при помощи интегрирования, был изобретён аж в 1814 году, а продвинутые электромеханические компьютеры во всю применялись во время Второй мировой войны, занимаясь задачами от управления огнём артиллерии и ПВО до расшифровки перехваченных закодированных сообщений.
Коллаж показывает все работы, дошедшие до финала, а всего в конкурсе приняли участие 572 проекта
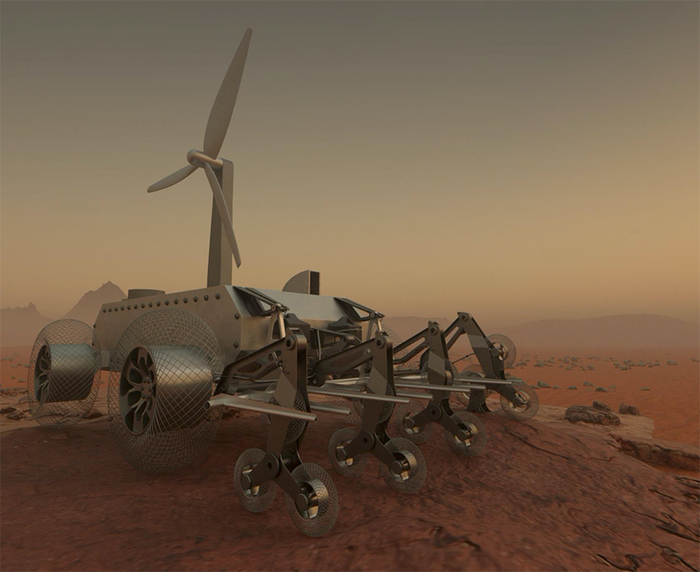
Победителем конкурса, получившим за свои труды $15,000, является концепт «Venus Feelers», созданный Юсефом Гали из Египта. Ровер работает на кинетической энергии ветра, запасаемой в пружинах. Передняя секция, состоящая из рядов треугольных колёсных стоек, «ощупывает» дорогу перед собой. В случае небольших препятствий вроде мелких камней и ям колёсики просто перекатываются через него и ровер продолжает движение. Но, если препятствие большое, будь то глубокая яма, крупный камень или крутой склон, изменение положения колёсиков фиксируется механической системой, и ровер останавливается. Очень интересное видео, показывающее принцип работы устройства, доступно на YouTube.
Venus Feelers
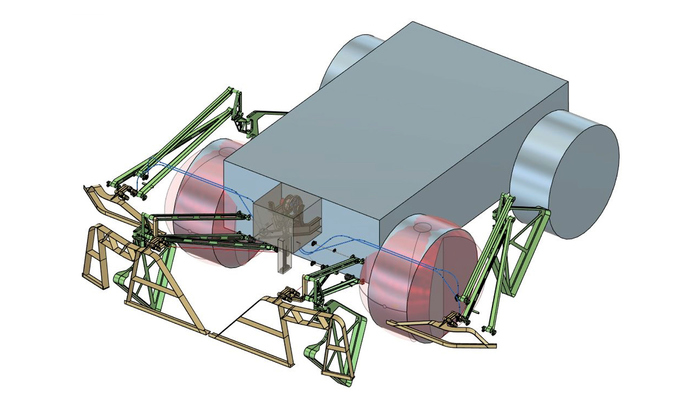
Второе место с призом $10,000 заняла система «Skid n’ Bump – All-mechanical, Mostly Passive» от команды Rovetronics из Калифорнии. Этот концепт работает при помощи хитрой системы рычажков, колёс и пружин, приводимой в действие при помощи щупа, находящегося перед ровером. Если щуп натыкается на препятствие или «клюёт» вниз, то колёса ровера блокируются, и он останавливается. Промо-ролик проекта на YouTube демонстрирует работу системы на примере небольшого прототипа, ползающего по камням где-то в калифорнийском саду.
All-mechanical, Mostly Passive
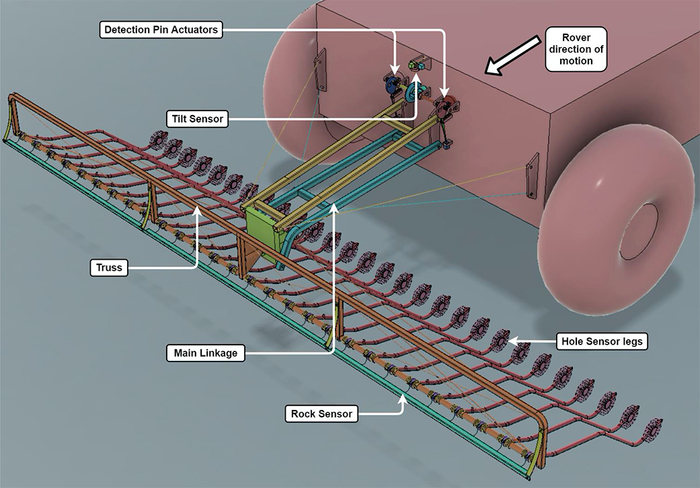
На третьем месте с наградой $5,000 оказался Каллум Херон со своим «Direction Biased Obstacle Sensor (DBOS)». Он использует ферму с датчиком качания спереди, ножки датчика отверстий сзади и датчик наклона, установленный на корпусе ровера.
Direction Biased Obstacle Sensor (DBOS)
Также NASA выделили две дополнительные награды по $2,000 каждая: за «лучший прототип» — её получила компания KOB ART из Латвии с впечатляющим полноразмерным прототипом «AMII Sensor», и за «самый инновационный концепт», которую получил Мэтью Рейнольдс за «ECHOS: Evaluate Cliffs Holes Objects & Slopes» — концепт механического сонара, используемого для распознавания объектов.
Кроме того, в NASA отметили ещё несколько работ, с полным списком которых можно ознакомиться на странице итогов конкурса на сайте агентства: https://www.nasa.gov/feature/jpl/nasas-venus-rover-challenge....
https://www.nasa.gov/feature/jpl/nasas-venus-rover-challenge...
А как вы представляете себе механический ровер?

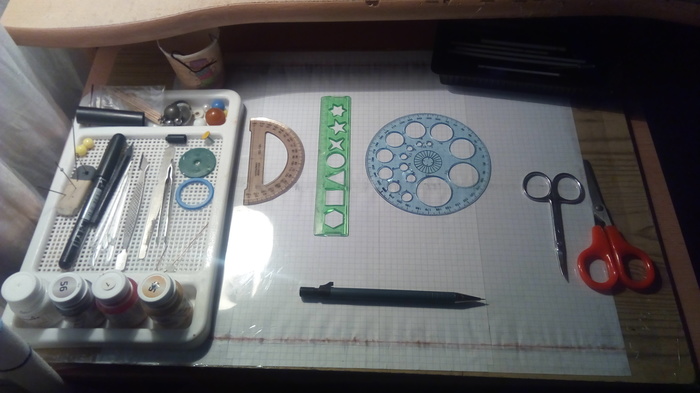
- Начало нового года, решил начать с реорганизации рабочего места (давно пора). Только думал сесть за работу и начать изготовление следующей фигуры...
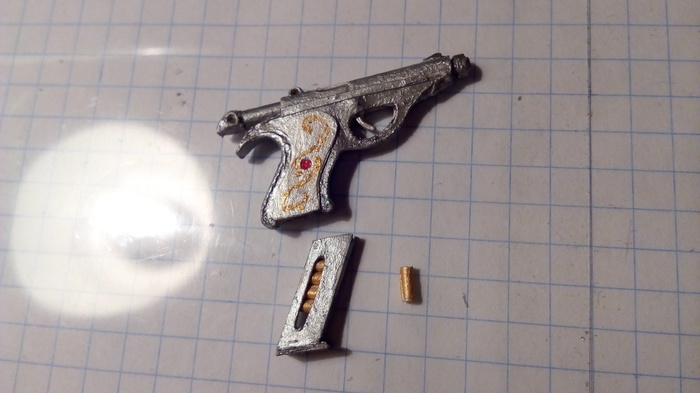
...гуляя на просторах интернета, как то наткнулся на весьма изящного вида пистолет и...тут меня понесло.

Кратко об пистолете:
"Whitney Wolverine" был продвинутым, «космическим», легким алюминиевым, полуавтоматическим пистолетом калибра .22 LR, созданным в 1956 году. Но увы он стал жертвой провального маркетинга на старте, к прочему у компании были финансовые проблемы, а добили его конкуренты Ругер и Кольт с более дешевыми образцами оружия того же калибра. Производство прекратилось в 1957 году.
- Что же о миниатюрной модели: начал с примерного рисунка, прикинув размеры приложив "трафарет" в ладонь Фокси.

- В дальнейшем создал отдельные трафареты каждой стороны, приклеил их к коробчатой основе для обоймы, а сверху постепенно обклеивал бумагой придавая желанную форму.

- Из подвижных частей: затвор, курок, вынимаемая обойма и гильзы. Внешне стилизован под расцветку Фокси.








- Честно, давно хотелось сделать что-то подобное, даже в таких масштабах. Нужно же какое то разнообразие, да и декоративные атрибуты для фигур тоже приятная...мелочь. Тем более он действительно здорово смотрится в её руках, да и намного легче уродливого пистолета из пластика.

- А что же на счет текущей актуальной работы, что же, наблюдательные сами догадаются, кто сейчас на очереди. ~.=.^
Продолжение темы. Это будет не большой пост, ибо до конца оставалось совсем немного, но времени ушло на это "немного" не мало.
- Думаю многие сталкивались с неприятным ощущением, когда долгая работа близится к завершению и всё сильнее одолевает лень её доделывать, пришлось не раз побороться с этим ощущением по ходу сборки.
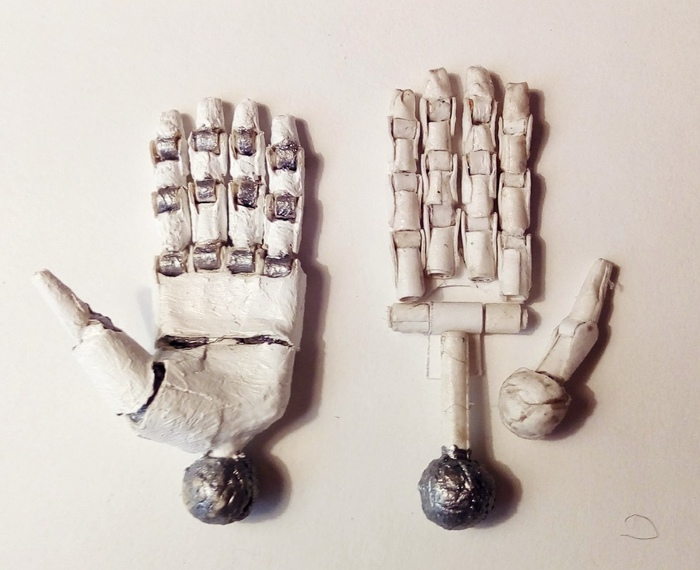
- Сперва нужно было наконец то доделать её правую кисть. Для этого нужно было сделать четыре пальца, у каждого по три фаланги и три сустава, ещё отдельно большой балец с шаровым суставом в основе.
Только одна загвоздка, есть негласное правило, если нужно делать парные детали - делайте их сразу! Эту руку делал с большим промежутком по времени и она получилась немного другой, но как ни странно, получилось даже лучше левой кисти.
Тонкие полоски скручивались на скрепке для создания мелких суставов для пальцев.

Собственно, из чего кисть состоит:
- Полный набор пальцев, только четыре из них по 3 фаланги имеют, большой палец с ш-шарнирной основой.
- Место сгиба с простым шарниром (суставом);
- Ось с частью ш-шарнира (основа в самой руке).
Остальное же дополняется кусочками бумаги, придавая полный объём и форму кисти.
- Так же сложной частью является и покраска фигуры, особенно когда куча мелких и подвижных частей. Один неверный мазок и всё насмарку! Приходится использовать зубочистку и её кончиком аккуратно наносить краску, а лишнее соскребать лезвием ножа или иглой. В покраске использовалась акриловая краска для декора.

Сделать фигуру - это пол беды, сделать её красивой - ещё сложнее.
- Для узоров пришлось придумать свои трафареты, по обводке которых и будет получатся желаемый узор.
Трафареты двух видов:
* с внутренней обводкой - рисунок получится меньше чем форма трафарета.
* с внешней обводкой - рисунок получится больше чем форма трафарета.
Первым вариантом лучше, ибо держать и обводить по внутреннему краю намного легче.
- Для ног была сделана такая форма не с проста, ибо по бокам "икр" были отверстия и их нужно было как то закрыть, но не хотелось придавать лишних утолщений, ибо с верху ещё узоры должны крепится. Решил обе проблемы разом!

- Трафарет что на фото выше и внизу слева, маленький, сделан для узора наплечников, но он стал универсальным. Ибо с ним получилось сделать вот такую красоту - эту деталь делал для рук.

- Она немного оборачивается вокруг рук и крепится на той же оси без(!) клея, только её концы у основания кисти склеены между собой.

- Украсил половинкой шарика селикагеля, с нанесённой акриловой краской для цвета и всё готово.


Закончил, наконец то я её закончил! Это словно тянулось вечность...
То чем она была вообще не сравнимо с тем чем она в итоге стала:
- Она подвижна, но легко держит позу, даже легче чем другие мои фигуры, благодаря обилию шаровых суставов (22 штуки против 8 штук в старой версии);
- Она единственная (пока что) фигура с пальцами по три фаланги на обеих руках;
- Она единственная, кого почти полностью можно разобрать и собрать обратно, благодаря тем же шарнирам (руки в локтях тоже можно снять, они держатся на плотной втулке);
- Вкратце — она шикарна! ...пусть и не без огрехов.






- И не знаю даже что ещё добавить... я просто...продолжу делать фигуры. Кто же будет следующим? Путь это будет сюрпризом ^.=.^









